関西地区練習会に参加する
全日本でやらかしたゴール区間に入りきれなかったことを修正する。
まずは、最終的に速度が0m/sになる設定だと、途中で壁に当たってしまった場合などに減速中に早く0m/sに到達してしまい、フィードフォワード制御の影響もあり前進できず、目標の距離まで到達できない場合があった。そこで、減速中に速度が0m/sになった場合には、減速用のフィードフォワードを無効化するように変更した。
さらに、最短走行時のゴール区間では、ゴール後に前壁センサの両方が反応しなかった場合、低速で前進し続ける処理を追加。これにより、ゴール壁にしっかり接触するまで確実に前進できるようにした。
マイクロマウス2024
大会を運営してくださった皆様ありがとうございました
運よく全面探索に成功し最短走行成功させることができ、4位入賞とベストマウサーを頂きました。
全日本大会直前、探索走行の不具合が露呈して対応を余儀なくされた。既知区間加速の直後に見探索の直線がある場合に、壁切れでの距離補正すると1区間ずれる挙動をしていた。なぜか既知区間加速での壁切れ処理を取りやめると正しく動いているので、いったんは壁切れをやめて大会に臨むことに。
大会の試走日では探索走行が安定しない、壁を見誤ったり、停止位置がずれたり、先の不具合も再発していたようだった。悩んだ挙句、既知区間加速の処理を全て取りやめて調整を終える。既知区間加速の処理は5年以上変えた記憶がないのだけれど今まで運がよかっただけなのだろうか?
大会本番、祈りながらの探索は運が味方して無事成功。既知区間加速がないことによるタイムロスは少なそうに見えたけれど、北の端の直線は時間切れで見に行かなかったのかもしれない
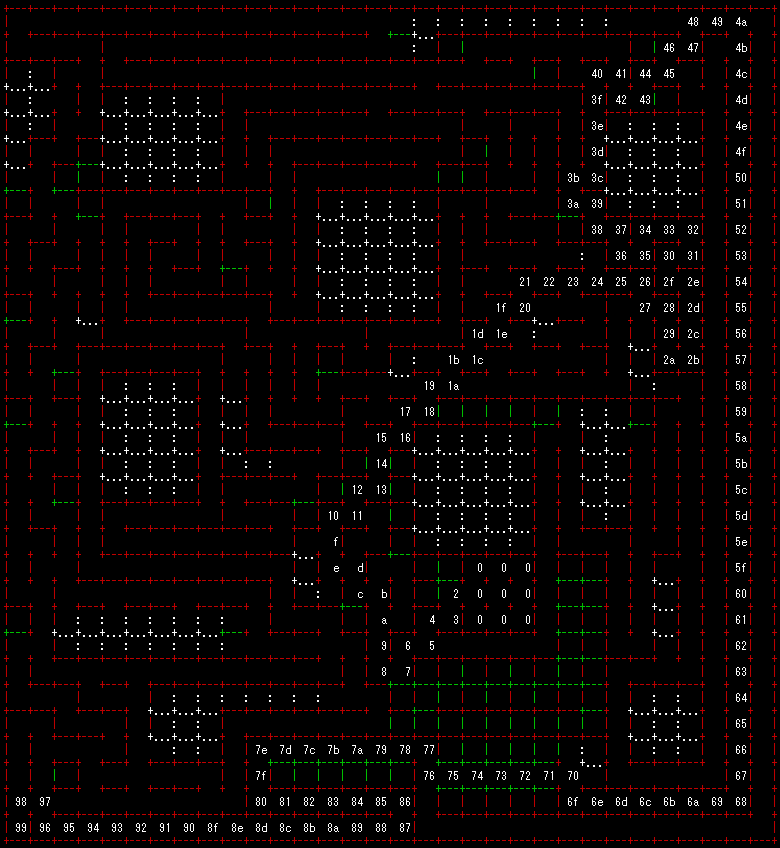
3走目の最短走行は安定パラメータのはずがクラッシュし、4走目はゴール区画に入りきれず記録なし。もしかしたら減速中に壁に当たると何か不具合があるのかもしれない。
最終走行は仕方がないのでほぼMAXパラメータを選択して、運よく最短走行成功。
この走行のパラメータは直線速度5.5m/s,直線加速度40m/ss~20m/ss,斜め速度5m/s,斜め加速度30m/ss~20m/ss,90°ターン2m/s,180°ターン1.8m/s,V90と斜め45°侵入が1.6m/s,その他が1.7m/sという去年よりも攻めたパラメータ。おかげで魔王まで0.5秒まで近づくことができた。
素晴らしい大会を運営してくださった皆様、ありがとうございました。
体積エネルギー密度と放電能力
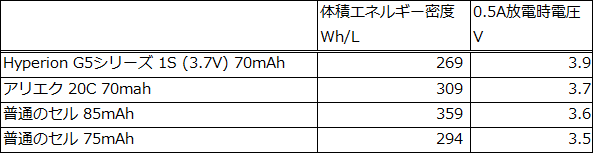
前回の続き。手元にある大電流対応のセルと汎用のセルの電池部分の容積を測って体積エネルギー密度を算出して、満充電後すぐに0.5Aを放電してその時のセル電圧を測定してみた。
結局のところ放電能力の高いセルは体積エネルギー密度が薄い傾向があるのは正しいが、その逆は成り立たなくて、体積エネルギー密度が薄くても放電能力が低いことはあるようだ。
余談
リポのサイズは「751517」のような記載があって先頭から2桁づつがセルの厚さ(の10倍)、幅、長さをmm単位で示しているが、最後の2桁の長さ寸法については電池部分のみの長さだったり、安全回路を含んだ長さだったりして実測するしかなかった
掘り出し物のリポはないか?
Amazonとかアリエクスプレス、またはその他のECサイトで購入できるリポバッテリーの中で、マイクロマウスに適した掘り出し物を見つけるにはどうしたらいいだろうか?ということでリチウムイオン電池について調べていく
リチウムイオン電池の正極の種類にはLiCoO2(コバルト酸リチウム)、NCA(ニッケルコバルトアルミニウム)、LMO(マンガン酸リチウム)、FePO4等、があり、LiCoO2が広く普及しているもの、NCAは公称電圧が3.6Vになる。LMOバッテリーは公称電圧3.70V(3.80V)で充放電特性も優れる。FePO4は公称電圧3.2VでLi-Feバッテリーと呼ばれているもの。また、LiCoO2の中でもLiHVは公称電圧3.8Vとのこと。
一方、リチウムイオン電池の負極には黒鉛が広く使われていて、チタン酸リチウムは電圧が低くなる
そのため、ECサイトで販売されている公称電圧が3.7VのものはLiCoO2かLMOになりそうである。LMOのほうが放電特性が優れるがLiCoO2でも15Cの物はあるようだ。
その他の参考
リチウムイオン電池用電極材料
リチウムイオン電池の「正極材」の種類と特徴を化学的に説明|有力な正極材メーカーも紹介
リチウムイオン電池の構造では、容量と出力特性はトレードオフの関係になっているそうで、たしかに手元にある15Cとか20Cとかのハイレート対応のセルは体積が大きいものが多い。
ということは、特に記載のない電池でも容量に対してサイズの大きいものは出力特性の良い可能性が高くなるのだろうか?
LCRメータを買ってみた
この記事はマイクロマウス Advent Calendar 2024その2の21日目の記事です。
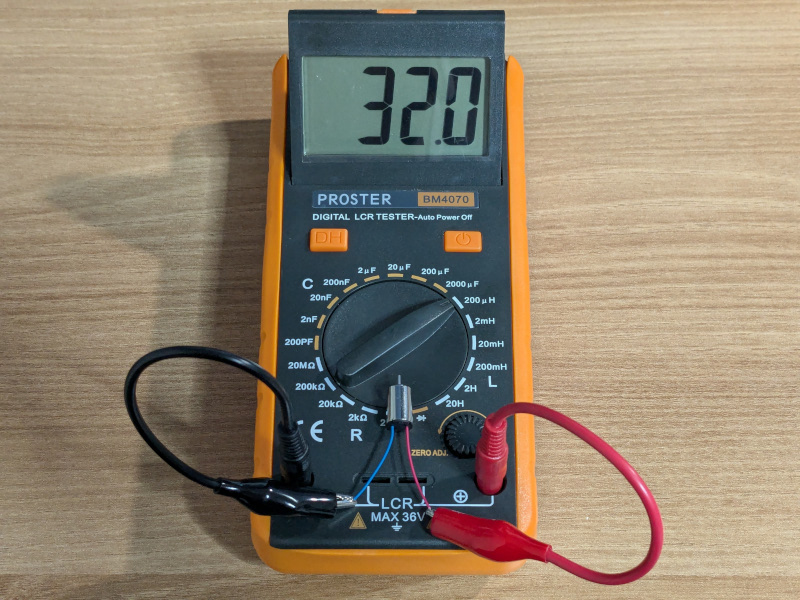 Amazonで買えるLCRメータを使ってモータを測定してみた
Amazonで買えるLCRメータを使ってモータを測定してみた
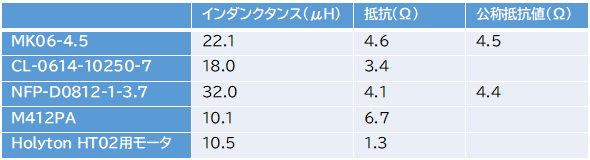
※測定周波数は約1kHzだった
MK06-4.5は定番のモータ。抵抗値が大きいので1セルではパワーを出しにくいけれど、2セル以上ではよい出力になる。残念ながらディスコン。
CL-0614-10250-7は吸引用に使われることの多いモータ。1セルではイマイチだけど、印可電圧が5Vくらいから吸引用として使いやすくなる。2セル以上では駆動用にもいいかもしれない。
NFP-D0812-1-3.7は最近使用者が出てきたモータで、高トルク低回転型。
M412PAは以前に流行っていた吸引用のモータ。軽量化を狙う1セルの機体にはいいかもしれない
Holyton HT02用モータは抵抗値が小さく1セルでも電流を流せてトルクが出せるため駆動用に使って2Gの加速ができた。また、吸引用モータとしても使用していた。
MATLAB始め
この記事は12月11日のアドベンドカレンダーです。

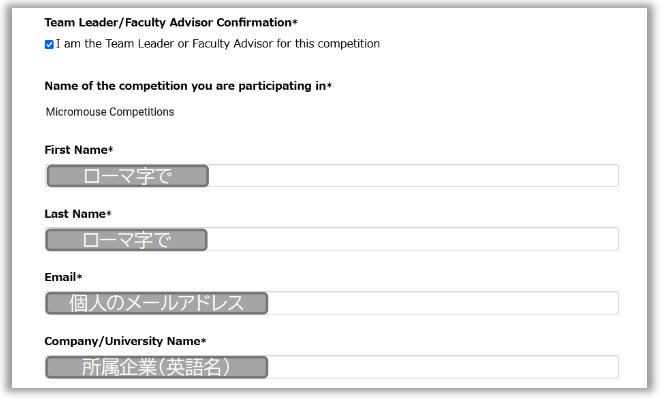
個人用ライセンスもあるけれどマイクロマウス競技に参加予定のチームはMathWorks社よりMATLAB, Simulinkを含むライセンスを提供してもらえる。これは学生だけでなく社会人も個人も申請可能なので申請してみた。
申請フォームは「 学生コンテストのソフトウェア」と書いてあって社会人が申し込んでいいのか不安に思うけれど(何度かニューテクノロジー振興財団に相談して)個人のメールアドレスと所属企業名の申請でライセンスを付与してもらうことができた。
インストールしたもののMATLABは初めてなのでテキストにArduinoとMATLABで制御系設計をはじめよう! 第2版を買って勉強をはじめてみた。今は第3章まで終わってArduinoをMATLABやSimulinkで動かしている。
来年度はSimulinkで作った制御でロボトレース競技に参加してみたい
ターン調整のルーティン
この記事はマイクロマウス Advent Calendar 2024の1日目の記事です。
マイクロマウスのターン調整のルーティンを紹介。
できるだけ実走行を少なくして曲がりにくいターンから調整を行う。ターンの曲がりにくさは、斜めから斜めへの90度(V90)≧直線から斜めへの45度侵入>>直線から斜めへの135度侵入>>>その他のターンなので、直線から斜めへの45度を曲がれればV90も曲がれる可能性が高いし、その他のターンはまず曲がれる。
step1
ターンの目標速度を決める。マイクロマウス(ハーフサイズ)なら1セル吸引有りで1.3m/s、2セル吸引有りで1.4m/sくらいを狙える
step2
ターンシミュレーター(例)を使って直線から斜めに入る45度ターンのパラメーターを決定する。
シミュレーターはスリップ角を考慮するけれど、スリップ角は遠心力に比例すると仮定して、遠心力はF=m⋅v⋅ωなので、角速度に比例して機体の角度に対する進む角度を浅くするだけでそこそこ使える。
step3
実際に加速用の直線と斜め45度侵入、減速用の斜め直線のみの組み合わせを走らせて、停止位置を測る。
step4
実走行での停止位置とシミュレーションの停止位置が近くなるように、シミュレーターのスリップ角の係数を調整する
step5
シミュレーター上で目的の停止位置になるようにパラメーターを調整する
step6
調整したパラメーターで再び実走行を行い、停止位置を測る。
step7
停止位置が目的の位置になるように、ターンの前後距離を調整する
step8
走行ログを確認して、ターン中の角加速度と角速度が目標に追従しているかを確認する。乖離していればゲインを再調整する
もし、ゲインを調整しても角加速度が間に合わない場合、あるいはモーターへの制御量が100%担っている場合には、そのターン速度は実現できないので、目標速度を下げてstep2からやり直す。
step9
何度か実走行を繰り返して停止位置のバラつきを確認する。目標位置に対して各方向に±3mm程度に収まっていなければ、タイヤが不規則に滑っているので、step5に戻ってターンのパラメーターを振りなおす。シミュレーター上で別の角加速度と角速度の組み合わせを探す
step10
ここまでで合わせた(step5とstep7)パラメータをつかって、シミュレーター上で斜めから直線への45度脱出のパラメーターを作成する
step11
step4で求めたスリップ角の係数をつかって直線から直線の90度、180度のターンを作成する。
また、直線から斜めへの135度の侵入のパラメーターを調整して、そのパラメーターをもとに斜めから直線への135度脱出のパラメータを作成する
step12
シミュレータ上で斜めから斜めへの90度(V90度)のパラメーターを作成する。
step13
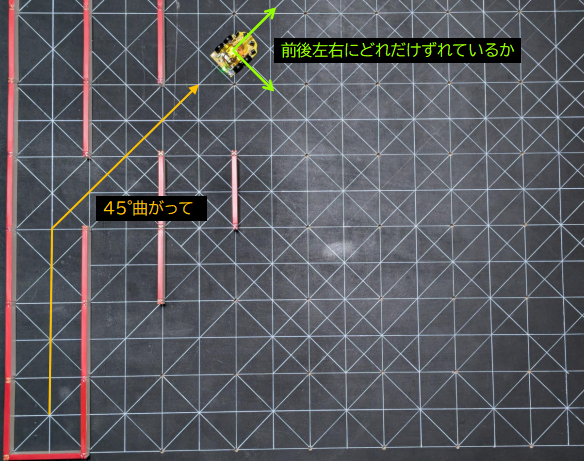
3個程度連続するV90度の迷路を作って走らせる。ここでは機体をぶつけながらの調整になるが、走行中の軌道を天カメで撮影することで少ない施行で調整を収束させるように努める。
以上で調整終わり。実際の迷路を走行しながらのターンの調整は行っていない
明日はアライさんによる釈明会見です。どしたん?話聞こか?
2セル対応バランス充電器
マイクロマウス(ハーフサイズ)に使用するリチウムイオン電池の容量は50mA/hから150mA/hの低容量の物で、それらに対してダメージを少なく充電するためには充電電流が小さい充電器が欲しくなる
低電流対応のバランス充電器を調べたので記録しておく
100mA対応
ISDT社 Q6 Nano
ISDT社 Q8
ISDT社 Q6 Retro
ToolkitRC社 M6D Series
ToolkitRC社 M7 Series
200mA対応
SkyRC社 B6neo
2セル用のバランス充電器は低電流での充電できるものが少ない。
一方、ここには記していないけれど1セル用の充電器は低電流対応のものが多いため、セルごとにコネクタを分けて1セル用の充電器でゆっくり充電する方が手軽に感じられる
続:1mmシャフトとベアリング
公差的には入るはずなのに選別しないと使えない1mmシャフトとベアリングの組み合わせ。
シャフトのメーカを変えても変化しなかった問題だったけれど、ベアリングをNSK社製に変えてみたらシャフトが普通に入った。
第41回マイクロマウス中部地区大会
激戦区であり怖いので近づかなかった中部地区大会に初参加する。
熟練者の多い地区だけあって、多い参加者をスピード感のある大会運営で裁いていた
全競技とも課題の難易度は高く、クラシック競技の迷路は最速経路が目視では判断つかないし、マイクロマウス競技の最速経路は斜めルートを臆せずに突っ切らないといけない。(片道探索にして走りやすい経路を選択したい気持ちもあった)
今回持ち込んだ機体は、Lipo2セルでは不足していたターンでのトルクアップを図って、さらに、直線走行の速度と距離の不具合も修正して結構早くしたもの。それでもなお中部大会はレベルが高く奮闘して5位(製作者順4位)、そして中部地区以外からの参加者に送られる特別賞「第三の勇者賞」を頂く。
去年から技術公開してた反射型エンコーダを採用した機体も少しづつ増えてきおり、その中でもFantom5thの構造が完成形のように見えた。
大会を運営してくださった中部支部の皆様、名古屋工学院専門学校の皆様、ありがとうございました