福岡県大会での1回目の走行でスタートミスをしてしまった。ミスにいたる経緯を見直してフールプルーフを行い2回目の走行に臨んだ。
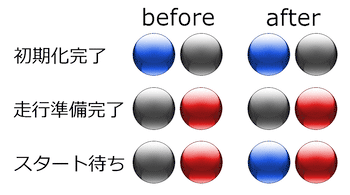
結果:スタートバーが開いてもスタートを切らなかった。
原因:スタート待ち状態に移行するためのスイッチを押しそびれた。
背景:スタート待ち状態に以降したかどうかの確認ができなかった。
対策:スタート待ち状態にもユニークなLED表示を設け、目視確認できるようにした。
////////////////////
時間が掛かったわりには画像がLEDに見えない。

マイナーチェンジ前のRY3048Foneボードには二つの切り替えスイッチが付いている。そのCPUボードを使用するにあたり、RXD1切り替えスイッチの凸部を切り、マジックで全体を黒く塗りつぶすことで誤操作しないようにしている。
DIPスイッチやLEDも設定を忘れがちになるので、素子の近くにメモを書いておく。
//////////////////////////////
アクリルで試作した下り坂センサ用のパーツを、カーボン製に置き換える。
下り坂検出の試作品を製作する。
もう少し速めに検出したいが、後手後手の処理でもコースアウトしないらしいので良しとする。
////////////////////////////////
九州大会の申し込み期限が10日までだと気付き、急いで申し込む。
最大数の参加台数を誇る九州地区。その運営に感謝である。
////////////////////////////////
水前寺の五郎八(いろは)に行きたい。
MCRロボットの車両速度はゆっくりと変化する。
速度の変化速度に比べ制御周期は数段速いので
・目標速度よりも遅ければ:PWM100%で加速
・目標速度よりも速ければ:PWM0%で減速
ってな制御でも十分な結果が得られる。
ただ、減速時の応答がイマイチになりがちので、改善するためのMy実装。
基本はPI制御、緩やかな変化なので微分項は省略する。
積分制御も使いづらいので、積分項を定数に置き換える。
定数は、あらかじめPI制御で変位ゼロに収束した時の制御量とする
以上で制御式は
制御量=変位×比例ゲイン+予め求めた定数
となり、上式を整形(変位が大きい場合に制御量をサチらせる等)して実装する。
//////////////////////////////
・ESD対策を進める
・下り坂検出法の検討
・高輝度LEDの配線を整理