http://www.mcr.gr.jp/current/2008/oshirase2009.html
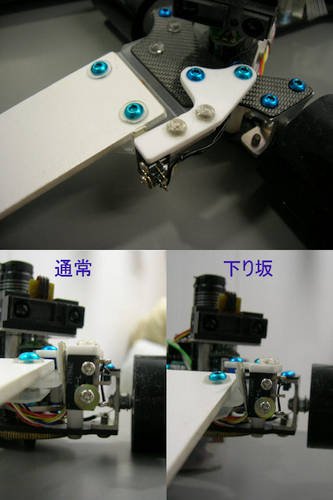
マシンの駆動により車体が沈下し、車検時より最低地上高が低くなりコースが破損という事例が競技中に確認されました。その為、競技規則の坂道の傾斜を「10度以内」と改訂します。
水の泡か。
//////////////////////////
追記
補助輪によりコースとの接触を防ぐことを検討する
同じ方法で地上高を下げることも可能だろう
08/11/09補助輪の付け方によってはレギュレーションで禁止となりました
レギュレーションの変更も進化圧