福岡大会での車検を見ていると、傾斜7°の坂道検査に引っ掛かかりそう(10°なら間違いなくOUT)なロボットの割合が多かった。
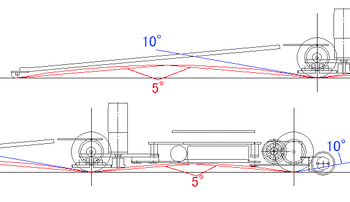
センサバー側の書き方は正しくないが、コースとのゆとりが無くなる箇所は略同じになるはず。
//////////////////////
basicクラスのタイムと、九州産業の優雅な走りが印象的だった。
福岡大会での車検を見ていると、傾斜7°の坂道検査に引っ掛かかりそう(10°なら間違いなくOUT)なロボットの割合が多かった。
センサバー側の書き方は正しくないが、コースとのゆとりが無くなる箇所は略同じになるはず。
//////////////////////
basicクラスのタイムと、九州産業の優雅な走りが印象的だった。
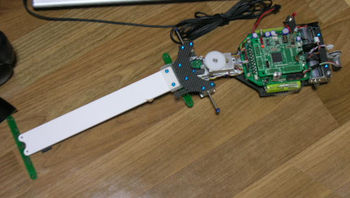
メカ&ハード7割完成

平日に埃の舞う作業ができなかったり、体調不良で病院に行ったら採血中に気を失ったり、なんだかんだで作業が遅れている。(申し訳ありません。各所への返信も遅れています)
メイン基板の実装を始めるが、ミスを繰り返す。以前の分に追加して、
・PLCCソケットの選定ミス(熱に弱い、はんだ付けし難い)
・PLCCソケットの向きを90度間違えて実装
・CPUボードのピン位置間違い(1mm弱全体的にずれている。CPUボードを載せるために、CPUボード&LDOを削ることに)
・ピンソケット用の穴が小さい(基板に挿入しにくい)
CPLDの動作は確認できた、途中pwmの出力が正しく出ず、マイコン側のプログラム上で2455*15をintに入れようとしていたという原因を見つけるのに時間が掛かった。
大会までに間に合うのか、微妙な線を行っている。