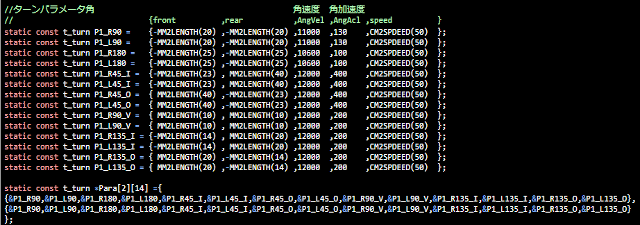
こつこつ 2022年1月6日2021年6月6日 by pidream ターン毎のパラメータ格納を考える ターン前オフセットとターン後オフセットと最大角速度と角加速度と速度とを構造体で宣言して、それを配列まとめてみる。x = Para[0][5]->AngVel; で呼び出す感じ
 ターン毎のパラメータ格納を考えるターン毎のパラメータ格納を考える
ターン毎のパラメータ格納を考えるターン毎のパラメータ格納を考える