次回作の仕様を検討する。思いついたら都度追記していく
・基板と樹脂の色はオレンジかピンク(黒色は視認性悪い)
・基板厚は0.8mm->0.6mmに変更
・全長を55mm程度に短くする(今の長さでは超信地旋回時に壁に当たることがある)
・シャフト径は1.5mm->1.0mmに(軽量化)
・部品の裏面(地面側)実装は、オーバーハングの内側or吸引用スカートの内側に配置しても問題ない
・壁センサ数は5個(前方向の2個は制御につかってない、それよりも真横と45度が欲しい)
・壁センサの変更
・電源SWをDIP品に変えて、実装面積を小さくする(全長を短くする関連)
・ファンは駆動モータの直近に置く(全長を短くする、オーバーハング外に吸引スカートがあると路面との距離を広げないといけない)
・駆動モータを買えたい(トルク不足で15ms^sができない)
月: 2022年2月
ターンパラメータの粗調整
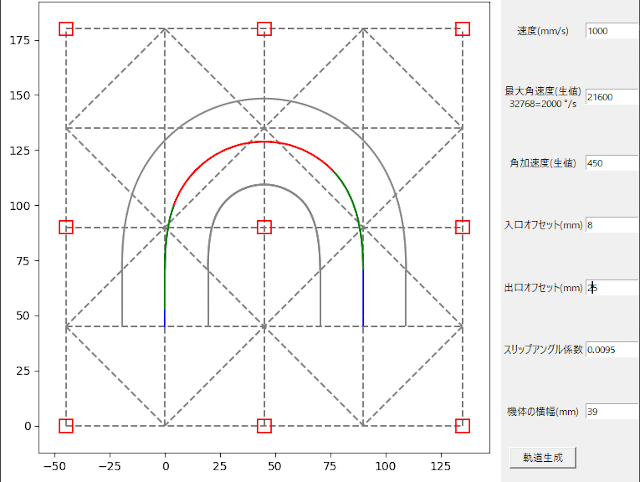
シミュレータを使ってターンパラメータの調整を開始する。
マイクロマウスの横滑り運動を参考にして、180度ターン後のX方向のズレを元にスリップ角を推定する。
この推定した値を用いて、他のターンのパラメータをシミュレータ上で決め、実際に走らせてみると、今回は2mm程度のズレで収まった。
荒調整として十二分に使えそう。
タイヤ交換
全日本に向けて、すり減ったタイヤと酷使してきたバッテリを交換する
ついでに、タイヤ径の再測定を行う。
具体的には、9区間分走る丁度良いパルス数をカットアンドトライで求めて、その値からタイヤ径を算出する。
再測定の結果、1年半前の測定結果から10%くらいずれていて影響範囲が大きそうである。
ついでに壁切れの補正距離もズレていた。こちらは壁切れの閾値計算を色々変えていっていた影響のようだ