モータに流れる電流の脈動を抑える意図ではなく、バッテリからの電流の脈動を抑えれたい目的で一旦試した。そして以下の2点が気になった
一つ目、モータの印加電圧に対する回転数の低下。バッテリの放電能力が低い物と組わせた場合に制御値PWMを100%にしても機体のヨー加速が目標値に達しない場合がでてきた。、Lのインダクタンス成分というよりDC抵抗の影響かもしれない
二つ目、こちらもDC抵抗の影響で、左右モータとLを合わせた状態でのPWMと回転数の特性が合わない。モータのバラツキはほぼ影響はないけれどインダクタの影響が大きく結果左右で10%の差が出てしまった
どちらももっとサイズの大きなDC抵抗の小さい物を選べば改善するかもしれないけれど、今回は搭載を取りやめた。
月: 2023年10月
光学式エンコーダNJL5820R
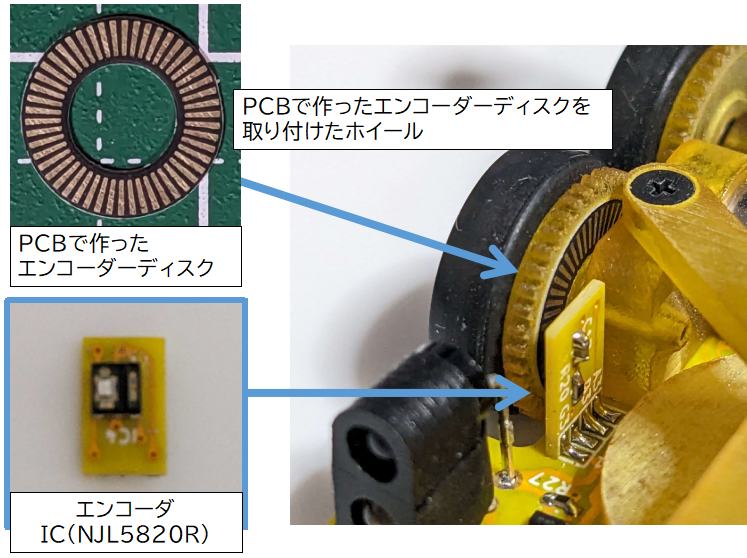
今年度のマウス(spangle V5)から導入したエンコーダについて紹介する。今回導入したエンコーダは日清紡マイクロデバイス社のNJL5820Rという反射型のエンコーダICを利用している。このIC(NJL5820R)は0.25mm/0.25mmの反射面、非反射面のミラーを組み合わせて動作するもので、今年度のマウスではこのミラーを円形のPCBにしてエンコーダ板を作っている。
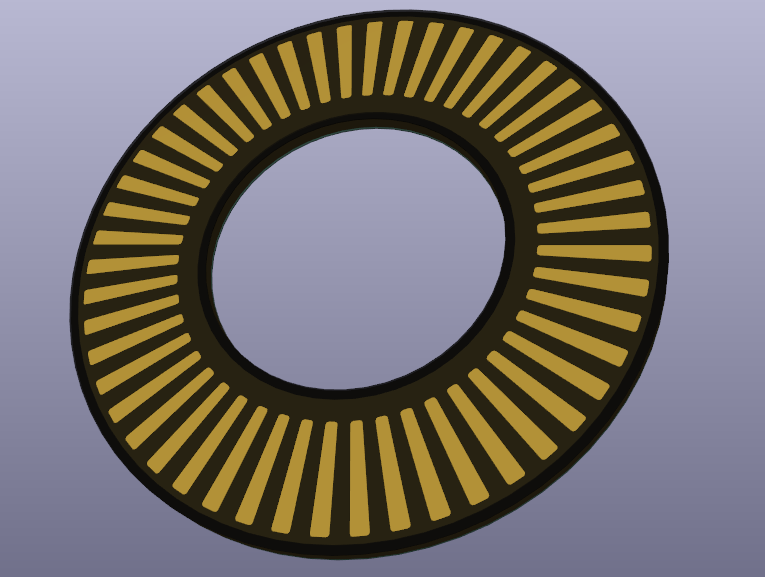
エンコーダ板は金フラッシュ処理されたパターン面とつや消し黒のレジストとで、反射面と非反射面のスリットを作っている。スリットの数は50で、円の直径8mm(≒(0.5mm*50個)/3.14)のところでエンコーダのスリット幅が合致して、かつ、ハーフサイズマウスのホイルの直径に収まる
このような構成でつくるエンコーダについてのノウハウとして、というか今回嵌った点について記録を残す。フォロワーの設計の参考になれば幸いである
・エンコーダ板とNJL5820Rとの距離
0.5mmを前後にしてあまりシビアでは無さそう
・NJL5820Rの発光LEDに流す電流
電源3.3Vに抵抗200Ωを組み合わせて10mA(≒(3.3V-1.4V)/200Ω)を流している。当初5mAを流している時にパルスを読み落とす場合があったのが電流を大きくすると解決した
・エンコーダ板の汚れ
エンコーダ板の金フラッシュが”くすん”でいる物を使った場合にパルスを読み落とす場合があった
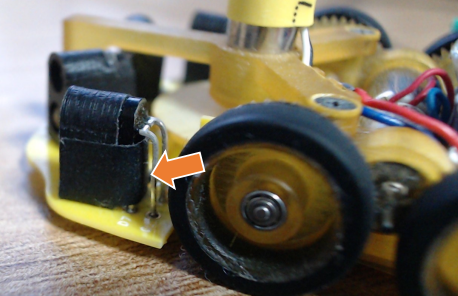
・壁センサとの干渉
壁センサの光を受けてパルスカウントが増える場合があり、壁センサの発光LEDの後ろ側を遮光すると解決した
・センサの発光側をエンコーダ板の内側にするか外側に配置するか?
エンコーダ板は直径が小さくエンコーダ板の8mmの位置の内外によってスリット幅が大きく変化する。そしてNJL5820R発光側と受光側に1mm程度の距離がある。そのためNJL5820Rの発光側と受光側のどちらともを理想的なスリット位置に配置することはできない。今回は発光側を外側にして受光側を内側に配置したが、逆の方が発光の反射光を多く出来て良い(発光LEDに流す電流を小さくできる)のかもしれない(未検証)
・黒レジストの下のパターン
今回はエンコーダ板の表面に不要な凹凸がないほうが良いと考えてレジストの下にもパターンを残したが、可視光で黒色に見える黒レジストが赤外光に対して”透過しない”かどうかが分からない(未検証)