やる事リストを潰していく
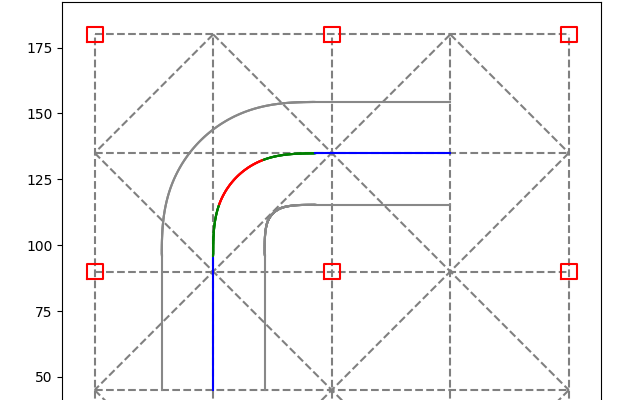
①探索走行でのターン前のオフセット距離を10mmから6mmに変更。探索速度は300mm/sなので壁検知からターン方向決定までの計算時間は20ms以内に完了する必要あり。
②電圧が3.7Vを下回ると走行を開始できないようにしていた処理を、電源投入後5秒間までしか行わないように変更
③走行終了後やアイドル時に壁センサの動作を500ms毎にしか行わないようにして省エネ化。壁センサ用のタイマーをCMT.CMSTR0.BIT.STR1ビットで動作・停止を切り替えてみる
やる事リストを潰していく
①探索走行でのターン前のオフセット距離を10mmから6mmに変更。探索速度は300mm/sなので壁検知からターン方向決定までの計算時間は20ms以内に完了する必要あり。
②電圧が3.7Vを下回ると走行を開始できないようにしていた処理を、電源投入後5秒間までしか行わないように変更
③走行終了後やアイドル時に壁センサの動作を500ms毎にしか行わないようにして省エネ化。壁センサ用のタイマーをCMT.CMSTR0.BIT.STR1ビットで動作・停止を切り替えてみる