タイヤに埃が着くと急に機体が振動的になる場合があったのでメモ
タイヤに埃がついたり、特に探索中の小さなRでは変則4輪の接地は不安定にった場合に、変則四輪のヨー減衰性?が下がることで完全な接地状態でのゲイン設定では走行中に機体が振動するようだ。
曲がりにくい変則4輪ということでハイゲインにしていたけれど、2輪状態で振動しない程度の値にすべきか?
pidream
ターンシミュレータ
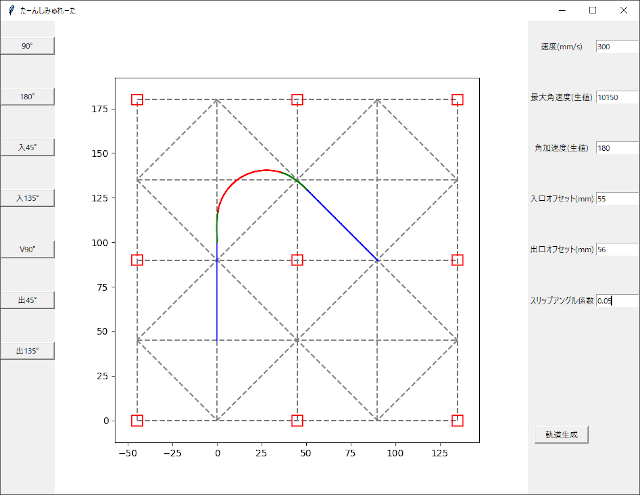
調整の効率化のため、こつこつと
//スリップアングルというか回転半径を機体の角速度で代替してるのよくないかも
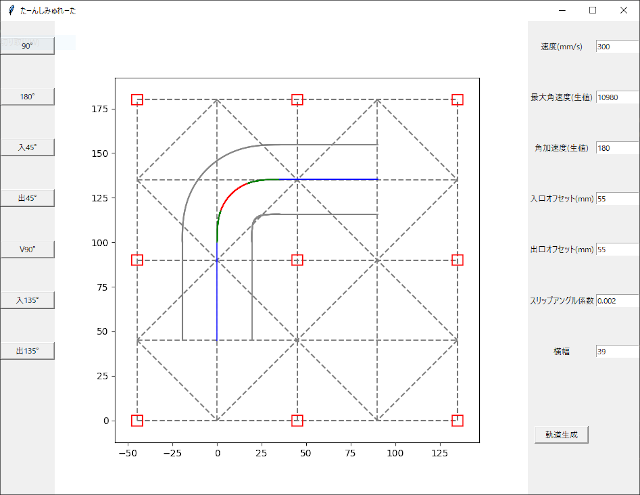
21/8/14追記:タイヤ(≒車幅)の通過ラインはあったほうが良い
車体サイズ
車体サイズをトレンドと比較してみる
spangle v3 仕様
重量[g]:19.4
サイズ 長さx幅x高さ[mm] :62.5 x 38.5 x 24.5
動輪:4輪/直径13.6 幅3.5mm
重量が約5g重くて、全長が約3mm長いようで、次は
重量はベアリングのサイズと駆動軸の径を小さくして
全長はファンのサイズ小さくして、取り付け位置をセンターに寄せよう
ファンの位置がタイヤ軸より前にあるほどに、コース継ぎ目の段差を考慮すると吸引スカートの路面との距離を詰めれなくなるのも改善したい
リアのオーバーハングは短いほうが、スタート直後のターン用に加速距離を微々だけど稼げそう(といっても限度があるので、初手がターンの場合にはパラメータを別にしているのだろうか?)
こつこつ
数年ぶりに斜め走行開始
スラロームのパラメータは横滑りを考慮していないスラロームシミュレータで作った物で、簡単な物でもこのくらいの速度な殆どど合うので便利
こつこつ
大会参加はできないけれど作業を進める
・ターンの軌道
横滑りを考慮していないターンシミュレータを作ってみたものの現実との差が大きく悩んでいた。試しに角加速する区間を長くして等角速度区間を短くしてみるとそこそこ合うように。ヨー加速時の誤差が大きいようだ。
先人の知恵(マイクロマウス調整法(僕向け) | taniho’s blog)をみると
円弧軌道で転回する角度は,転回する合計の角度の 1/3 で固定しています.(どうしても調整が難しい場合のみ変更)
へー。
・速度制御目標
山の頂上にフラットになる区間を作っていたのを廃止。加速から減速に切り替わる時の遅延を気にして作っていたけど、その誤差は直線の最後の部分の定速度区間で吸収していた
また、ターン直後から加速するのを少し待つようにする
こつこつ
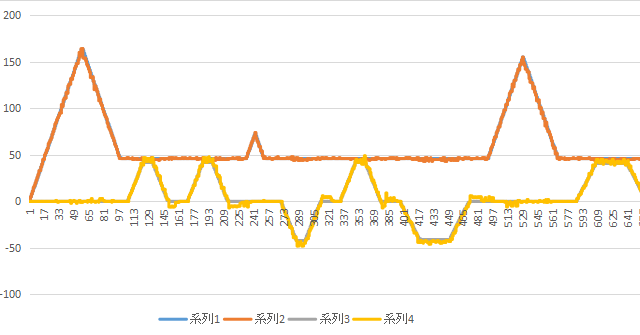
角速度のFF項について
目標角速度に応じて、左右のモータにかけるトルク差をFF項として入力している。
その比率は、2種類の角速度での実測値から目標値に比例して大きな値にしていたのだけど
その算出に使用した角速度のレンジを外れて、早くなるにつれ目標値より早い角速度で旋回するようだ
ある程度加速度が高い値からは一定の方が良さそう。
直進方向の速度も影響していそうに思うし、どうやってるのだろうか?
記憶が・・・
ソースコードの更新日時を見るに昨年の9月くらいから停止していたマウス。どこまで作っていたかを思い出すところから始めないと
210126追記
・ジャイロの公正は終わっている
・探索は作成済み
・ターンは探索用の90度のみ作成
・吸引が弱い
・串対策は無効化している
・探索走行で、進入角度が怪しい場合に超信地旋回に切り替える処理がOFFになってる(変則4輪で使えるのか?)
210128追記
・最初の探索のゴール後、全探索のステップに移ると、その場で最高速で回転しだす。
↑袋小路での超信地旋回では問題なし
↑重ね探索で復路を戻るだけなら問題ない
210131追記
全面探索動き出した
・壁切れ補正が上手く動いていない
・タイヤ直径を間違っている?
ファンの吸引力
吸引力が少ない。なぜだろうか?
2.5V : 6g
3.0V : 9g
3.5V : 12g
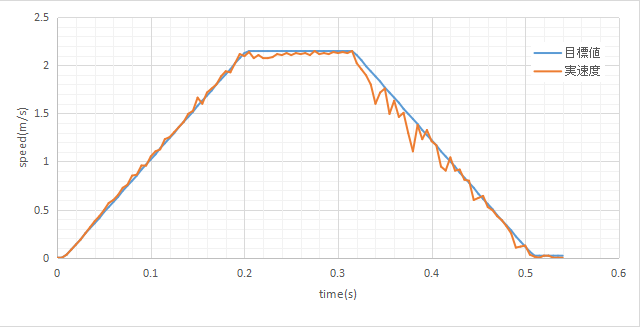
並進制御FF推定
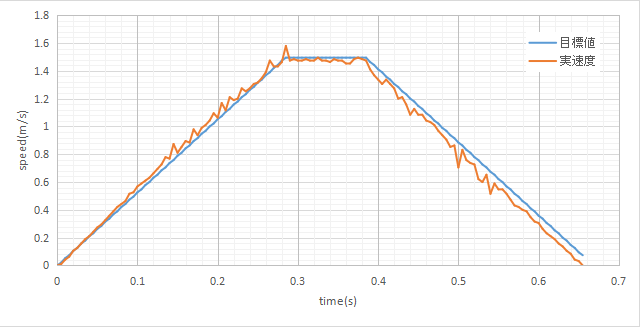
逆起電力推定でモータの逆起電圧(V_r)が判明したうえで、並進速度制御のためのFF項を推定する。
欲しい値は、加速度vs電圧の定数(a)と、走行抵抗を打ち消す電圧(b)(おそらく速度によらず一定)
※実際には電流を求めたいが、モータの抵抗値が不明ため電圧で代用している
マウスに、任意の加速→加速度0→任意の減速の目標信号を与えて(グラフ青)
加速時、減速時の実速度(橙)の傾きが、目標速度と平行になるように、a,bを調整する
(モータへの印加電圧は V = V_r + 加速度*a + b)
FFのみでの制御での合わせこみはコレくらいで良いのだろうか?
FB(PD)を追加して吸引ファンも回して約10m/s^2で加減速してみる