2/8(土)9(日)に行われた第6回マイコンカーラリー技術交流会in科技研に参加する
恒例となったこの競技会は今回も近畿以外からの参加者もあり盛り上がった。
競技でも全部門ともタイムが早く目を見張るものがある。
イベントを開催下さった科技研の皆さまありがとうございました。
2/8(土)9(日)に行われた第6回マイコンカーラリー技術交流会in科技研に参加する
恒例となったこの競技会は今回も近畿以外からの参加者もあり盛り上がった。
競技でも全部門ともタイムが早く目を見張るものがある。
イベントを開催下さった科技研の皆さまありがとうございました。
2019年某日。2005年モデルが、操舵モータのドライバFETの損傷と、操舵角検出用のポテンショメータのハーネス断線で帰ってきた。
故障メカニズムはポテンショメータの一部のハーネスが断線して隣の線とショート。そこに電流が流れてロジック系の電圧がDrop。低電圧によりモータドライバの回路が誤動作してモータドライバのHブリッジが貫通して破壊ってところだろうか?
まずは、ポテンショメータのハーネスを作り直して故障したFETを取り外してから、各部の電圧と波形をチェック。
問題なさそうなのでFETを貼り直して、ステアリングモータの動作を確認する。
走行停止の条件変更のリクエスト
現仕様のクランク区間を指定回数通過したら走行停止から、指定距離走行後に停止するように変更する。
(ただし停止処理は直線(操舵角が浅い)場合にしか動作しない。元の処理のまま)
いざH8のソフトを改修しようとすると、困るもので
コンパイラはメインの環境にはないので昔のノートPCを引っ張り出すことに
行方不明で生存不明なソースコードは10年前のコードをバックアップデータの底を浚って見つけ出した
RS-232のUSB変換器は買いなおし
書き込みソフトもその設定も資料を探す
ダウンロード(H8マイコンに関する資料)
シリアルモニタ
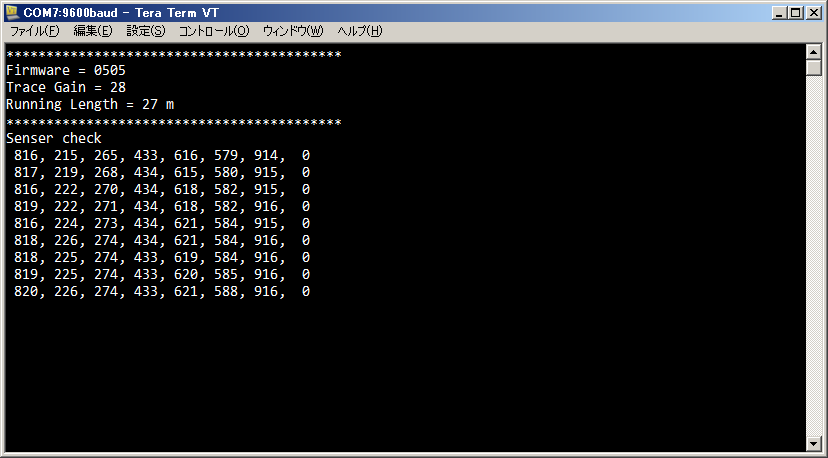
通常起動時のシリアル画面。
ステアリングゲイン(Mainボード上のDIPスイッチで設定)と走行距離(CPUボード上のDIPスイッチで設定)
センサーチェックは左7個はライントレースセンサの値と”何か”で、
右端は操舵角度(実角度の約倍の値。45度なら90と表示される)
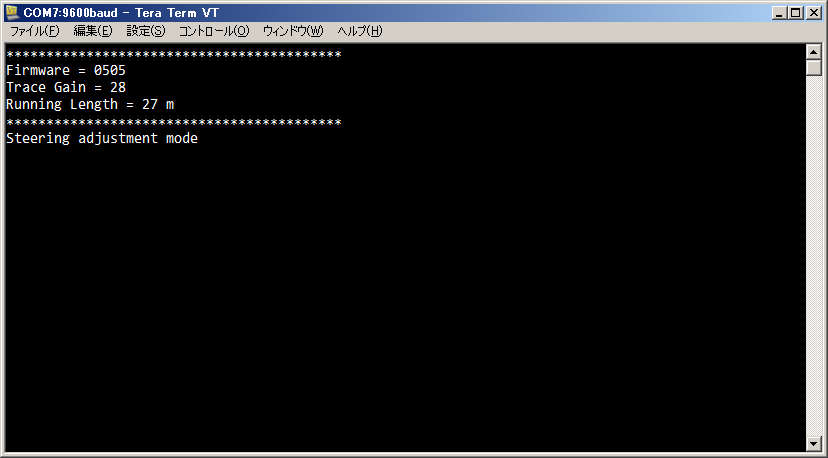
ステアリング角度0度調整モード:スタートボタンを押した状態で電源ONすると、このモードになる
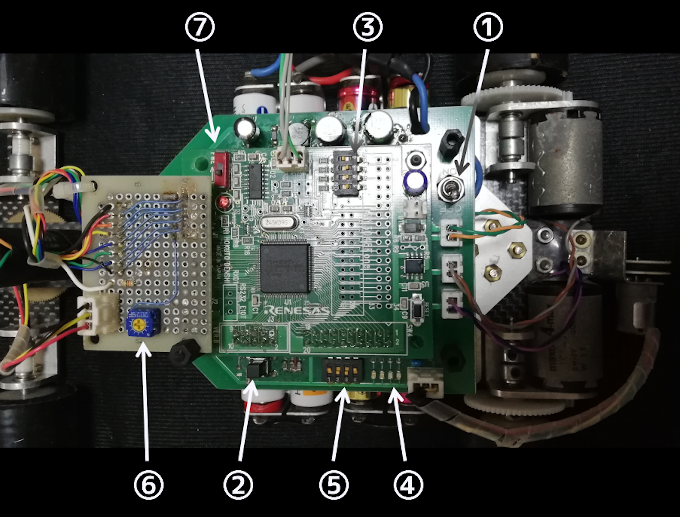
①電源スイッチ
②スタートスイッチ
③DIPスイッチ:走行距離設定用 3m~48m
④モニタLED
通常起動時:エンコーダパルス入力に応じて光る
走行中:???
走行終了:流れる
⑤DIPスイッチ:ライントレースゲイン設定用
⑥操舵角度0度調整用ポテンショメータ
⑦書き込みスイッチ
通常:内側
ファームを書く時のみ:外側
RY3048F-ONEtypeH
走らせ方
①電源スイッチON
②ラインセンサをコースの白線を真ん中で跨ぐように置く
③スタートボタンを押す(センサキャリブレーションとライントレース開始)
④スタートボタンを押す(走行開始)
段差等でタイヤが空転したときに走行距離が短くなる問題
距離カウントを左右のエンコーダの和で求めると空転したタイヤのパルスもカウントするが、
速度の遅い側の値×2を使えば空転の影響をなくせるのではないか?
→影響減った
別問題で加速度や速度を上げていくと、スリップにより走行距離が短くなる物についても対応したい
→少し効いたっぽい
マイクロマウス2019に参加する。結果はマイクロマウス競技ファイナル13位。
全面探索と斜め走行を導入した今シーズン。ファイナルでの斜めは成功しなかったが、全探索とオートスタートができたので良しとする。
探索
上の図は読みだしたマップで、黄色枠のところが読み間違っている。スリップでズレた時の物だろうか。
今回の探索は最初のゴールまでは足立法
5分までは一辺の壁も見ていない区間をゴールにして全探索を行い
その後は最短経路上の未探索区間をゴールにして探索を行う。(最短経路の再計算は袋小路などで停止した時にのみ行う)
6分経過後に未探索区間の確認が済んだらスタートに戻るようにしていた
(そのため、6分経過後も戻ってこなくて焦ったが)
最短
長い直線での距離ズレが 壁切れ補正の範囲を超えていたようだ
素晴らしい大会を運営してくださった皆様、ありがとうございました。
熊本高専で行われたマウス九州地区大会に参加する
東日本からの変更点は
・タイヤをホイルに両面テープで固定
・物理距離からパルス数への変換関数の修正
・ゴール区間の4マス対応
・最短走行のルートに算出に重み付けが反映されていなかった不具合修正
・直線速度と斜め速度Up
で、結果は4位。なんとか全日本のファイナルに進めそうだ。
大会を運営してくださった。熊本電波高専の皆様ありがとうございました。
初手のターン速度を探索と同じにしているのの遅さがだいぶ気になる。

パシフィコ横浜で行われた東日本大会に参加する。ロボフェス2019のイベントのため会場は大賑わい。
競技は、今回は斜め走行を成功して上限パラメータでの完走ができた
迷路と歩数マップ。本来赤線のルートを取るはずだったのだが、黄塗部が計算打ち切りで処理されてなかった
楽しい大会を運営してくださった皆様ありがとうございました。

リポの固定を両面テープから変更してみる
以前に機材の固定に良くつかっていた[ひっつき虫]。微妙に接着性のあるベタつかない粘土みたいなやつ
ぜんぜんわからない。私は雰囲気でマウスを直進させている。
横壁の値を直につかっての壁トレースってどの程度の人がやっているのだろう
串区間とか壁切れのタイミングの制御むずかしい
今はジャイロの値を元に真っ直ぐ(目標角0度)走らせながら、(ジャイロのみでPD)
・壁に近づいた場合に走る目標角度を壁から離れるように変更
・串区間では左右の壁切れが起きるタイミング(距離)の差ををつかって目標角度を変更
・片壁では、8mmくらいの前(過去または後ろというのか)の壁との距離が離れていたら、近づくように目標角度変更
に
ターン直前に進行角度が変化するのを防ぐために、直線の最後の半区間ぐらいは目標角度の増減の割合を減らしている
///
やりたいのは壁と水平になるようにすることで、中心をはしるかどうかは二の次のはず
7/28・29に西日本工業大学小倉キャンパスで行われた西日本大会に参加する
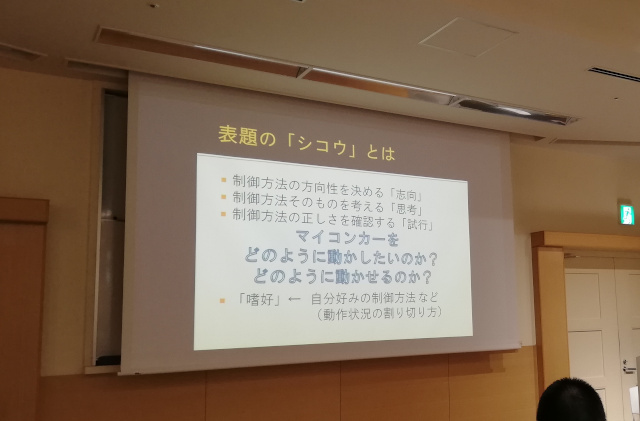
今回は土曜に記念講演が行われ、Basic,Advanceの設計の肝の話を聞くことができた
日曜の大会は午前中の4回走行のベストタイムによる予選と
午後の決勝という流れで行わた。
大会を通してではGR-Peach部門で完走がやはり盛り上がる。
さて、当方は決勝戦で無念のコースアウト。マシンにかまってなさ過ぎたか
楽しい大会を運営してくださった皆様、ありがとうございました。