2019年某日。2005年モデルが、操舵モータのドライバFETの損傷と、操舵角検出用のポテンショメータのハーネス断線で帰ってきた。
故障メカニズムはポテンショメータの一部のハーネスが断線して隣の線とショート。そこに電流が流れてロジック系の電圧がDrop。低電圧によりモータドライバの回路が誤動作してモータドライバのHブリッジが貫通して破壊ってところだろうか?
まずは、ポテンショメータのハーネスを作り直して故障したFETを取り外してから、各部の電圧と波形をチェック。
問題なさそうなのでFETを貼り直して、ステアリングモータの動作を確認する。
走行停止の条件変更のリクエスト
現仕様のクランク区間を指定回数通過したら走行停止から、指定距離走行後に停止するように変更する。
(ただし停止処理は直線(操舵角が浅い)場合にしか動作しない。元の処理のまま)
いざH8のソフトを改修しようとすると、困るもので
コンパイラはメインの環境にはないので昔のノートPCを引っ張り出すことに
行方不明で生存不明なソースコードは10年前のコードをバックアップデータの底を浚って見つけ出した
RS-232のUSB変換器は買いなおし
書き込みソフトもその設定も資料を探す
ダウンロード(H8マイコンに関する資料)
シリアルモニタ
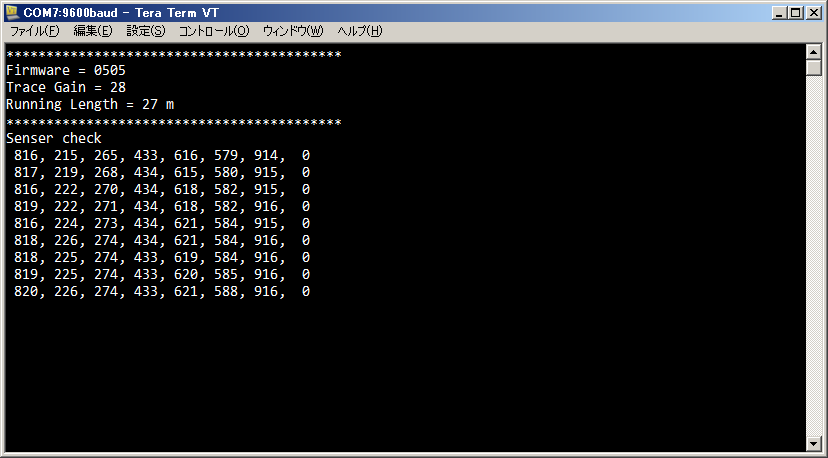
通常起動時のシリアル画面。
ステアリングゲイン(Mainボード上のDIPスイッチで設定)と走行距離(CPUボード上のDIPスイッチで設定)
センサーチェックは左7個はライントレースセンサの値と”何か”で、
右端は操舵角度(実角度の約倍の値。45度なら90と表示される)
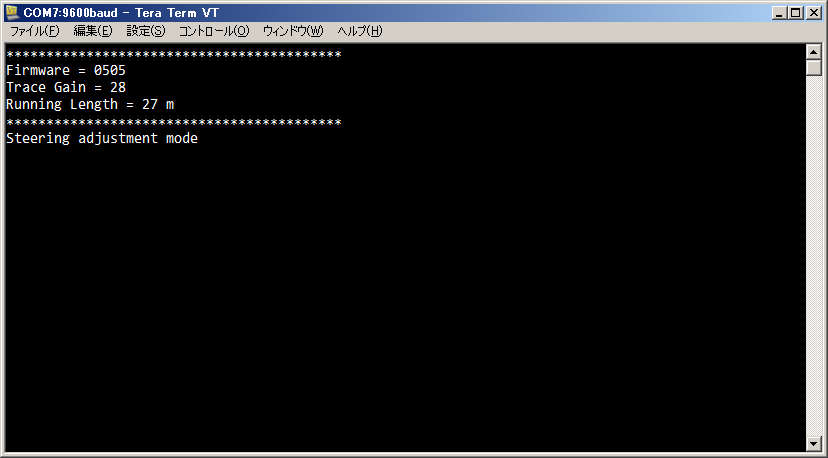
ステアリング角度0度調整モード:スタートボタンを押した状態で電源ONすると、このモードになる
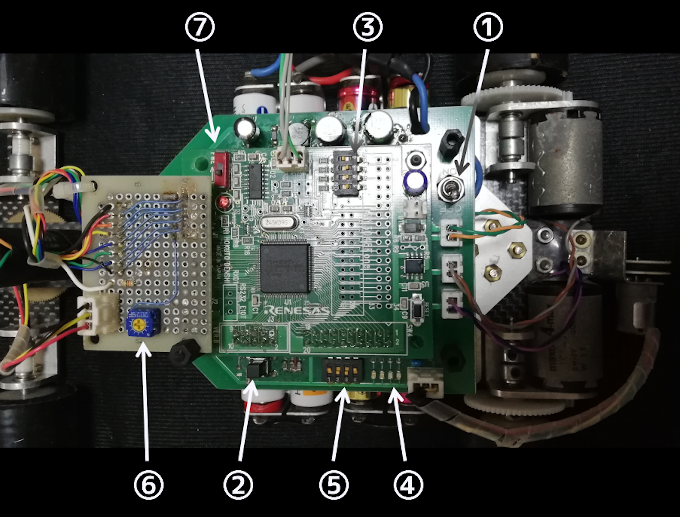
①電源スイッチ
②スタートスイッチ
③DIPスイッチ:走行距離設定用 3m~48m
④モニタLED
通常起動時:エンコーダパルス入力に応じて光る
走行中:???
走行終了:流れる
⑤DIPスイッチ:ライントレースゲイン設定用
⑥操舵角度0度調整用ポテンショメータ
⑦書き込みスイッチ
通常:内側
ファームを書く時のみ:外側
RY3048F-ONEtypeH
走らせ方
①電源スイッチON
②ラインセンサをコースの白線を真ん中で跨ぐように置く
③スタートボタンを押す(センサキャリブレーションとライントレース開始)
④スタートボタンを押す(走行開始)
続きを読む