マウスの基準線を鉛筆から変更。FNDさんサンクス
途中で気づいたが柱どうしを繋ぐ斜めの線は不要な気がする
///
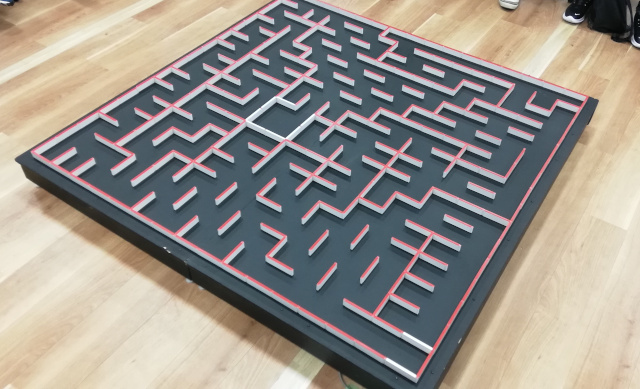
9×9で極細が2本つかう
7/28・29に西日本工業大学小倉キャンパスで行われた西日本大会に参加する
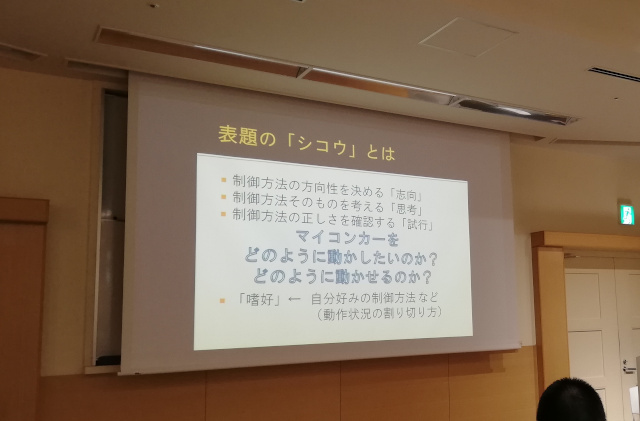
今回は土曜に記念講演が行われ、Basic,Advanceの設計の肝の話を聞くことができた
日曜の大会は午前中の4回走行のベストタイムによる予選と
午後の決勝という流れで行わた。
大会を通してではGR-Peach部門で完走がやはり盛り上がる。
さて、当方は決勝戦で無念のコースアウト。マシンにかまってなさ過ぎたか
楽しい大会を運営してくださった皆様、ありがとうございました。
大阪電気通信大学の駅前キャンパスで行われた関西地区大会
今年は天候も良く多くの参加者が集まった

クラシックの競技を一時中断して会場全体が注目したロボトレ最終走者(アニキ)
斜めないと辛いレイアウトだったが、準備を進めていた斜め最短が運よく成功した
みなさまお疲れさまでした
//////////////
・ハーフの迷路は左右の迷路の間にワッシャーを5枚入れて締めると、締結時に山にならなくていい感じになる
・会場設営で一番工数かかるのはロボトレで、これ以上の時短はできるのか??

東海大学熊本キャンパスで行われた東海大学 Challenge Cup 2019に参加してきた。
毎年増加の参加台数は114台になり、1コースでの大会では最大のイベントとなっていた。これだけ多いと、カメラ誘導とステルスあわせて4台の参加もある。
コースレイアウトはメインストレート途中のシケインや、くだり坂後のR450のタコツボ、車線変更出口から距離のないコーナ等で、なかなかタイムを出させない物になっていた。(気温が低いうちは、夏用タイヤでは難儀だった。)
競技は、Basicと学生A(1,2年生)と一般A(3年生はこっち、2年前のグランドチャンピオンもこっち)の3部門からなり、
予選は、4時間程のフリー走行のベストタイム制(及び所属チーム毎の決勝選出上限)となる。予選走行は、この参加台数でもスムーズな進行のおかげで5,6走は可能なようだった。
昼には予選を少し止めて、同日開催の小中学生によるマイコンレーサーの走行があり、クランクを走るまでソフトを書きあげた車もあった。
決勝は、学生Aが16台Basicと一般Aが8台が選出され行われ、全部門とも準決勝までを一区切りで進め、最後に続けて3部門の決勝となる。
個人成績は、運よく(外気温と出入り口のカーテンによる室温上昇によりタイヤが使えるようになり)一般Aで優勝できました
大会を開催して下さった東海大学の皆様、熊本の先生の皆様、お疲れ様でした。
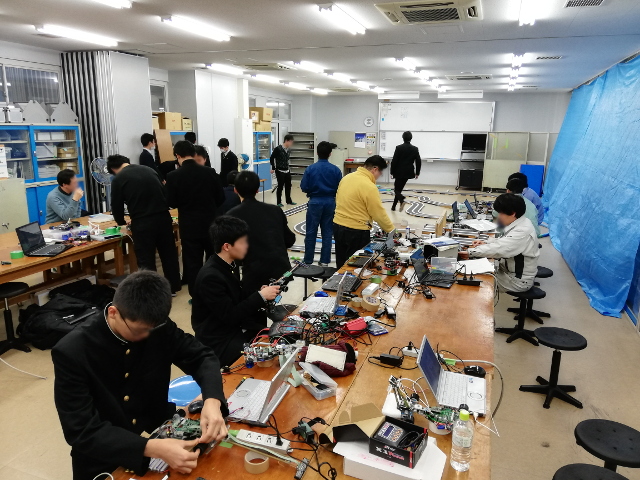
2月10日に神戸科技高で行われた技術交流会。今年も関西を中心に九州からの参加もあり会場は満員に。前日は試走日で、当日は3回走行のベストタイムによる予選と決勝が行われる流れとなる。
写真右端のブルーシートはカメラ誘導やGRピーチに配慮した外光の遮断用で、この辺が画処理MCRの本拠地といったところ。ただし、コースがきつい。だいぶ圧縮の効いたレイアウトで、さらに気温と路面のコンディションが刻々と変化する。
その結果、
当日は全く完走できず記録なしで予選落ち。久々にやってしまった。(2011年の横須賀以来か)
交流会を実施してくださった科技高の皆様、ありがとうございました

1月27日に西日本工業大学の小倉キャンパスで行われた第一回西工大杯マイコンカーラリー大会に参加した。全国から80台超のエントリがある大きな大会となっていた。
小倉駅近くの商業施設に繋がっているキャンパスはアクセス性が良く、広い会場は 雪天にも関わらず暖かくて走らせやすい環境となっていた。
土曜日には試走と技術交流会が行われ、試走で良く走っていた車や、技巧に優れた車に人が集まっていた。
日曜は本選。予選、決勝と進行していく中、最も盛り上がったのは決勝ではなく予選で、可変ウィングの車の完走と、GRピーチの車がクランクで、一旦バックしてクリアしたシーンだった。
本人はというと、スタッフ兼務と、タイヤやモータを庇うために走行回数を抑えるスタンスが良かったのか、運よく優勝できた。
楽しい大会を実施してくださった、西日本工業大学の皆様や福岡県MCR委員会の皆様。ありがとうございました。

運よくスケジュールが合い、全国大会の見学に。
史上初の2部門完全制覇に立ち会うことが出来た。
おめでとうございます。
既知区間加速実装
//////
YouTubeのスタビライズ機能、上の動画のような手振れの修正に便利だったのだが、いつのまにか廃止されていた。

・なんで、ゴール区間の入り口右折してたのだろう
→同一歩数の場合に西向きが最優先になってた
・最初の180ターンが、90度づつのままになっている
→180度ターンへの置き換え処理が、その前後の直線が30区画を超えると動作しない条件になってた。