トレースラインを検出するセンサについて、
センサで得た情報を何に使うかで制御方法を考える
①モータ制御量を決定する
標準プログラムのアナログセンサみたいなヤツ
センサから得たズレ量を、操舵モータに印加する電圧に変換する
トレース制御のためには、センサからの情報はリアルタイムに更新される必要がある。
②モータ速度を決定する
センサから得たズレ量から、操舵モータの速度目標値を決定する
制御モータの速度制御は別のFBが行う
これもリアルタイム性は必要。
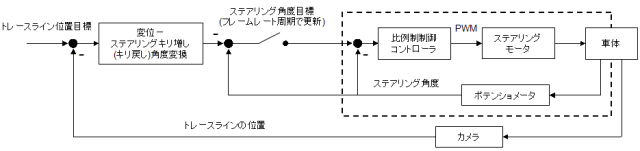
③操舵角度を決定する
センサから得たズレ量(とか)から、操舵角度目標値を決定する
操舵モータの角度制御は別のFBが行う
この辺から、センサからのデータの更新速度の重要性は、目標値の設定の正確さによって変わってくる。正確に目標値を設定できれば、センサからの情報は、あるていど離散的でもなんとかなる。
Basicの構成はコレ?
④操舵計画を決定する
センサから得たズレ量(とか)から時間/距離毎の操舵角度のシナリオをつくる。
センサからの情報は、シナリオの修正に使用される。
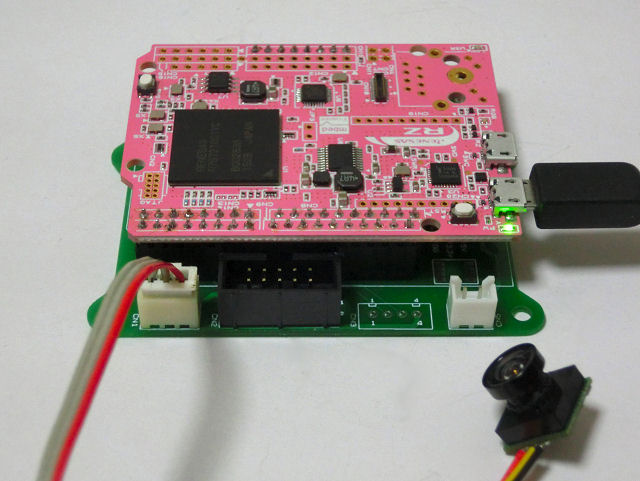
件のライントレース制御は③の構成。これは、画処理マシンの作り始め頃に30fps以下のカメラでの滑らかなトレースするために使用していたのが続いている。当時の画処理マシンのトレンドだったのもある。
今の450fpsとかのカメラでは①の構成でも行けそうだし、他の画処理マシンではその構成も普通のようだ。
NTFCカメラでのトレースしようとすると、③以上の制御が必要になる。突き詰めて行って④が実現できれば楽しそうに思う。