言いたいことは既にCMA-さんがネタにしていたのだけど、ボツするのも勿体ないので公開。
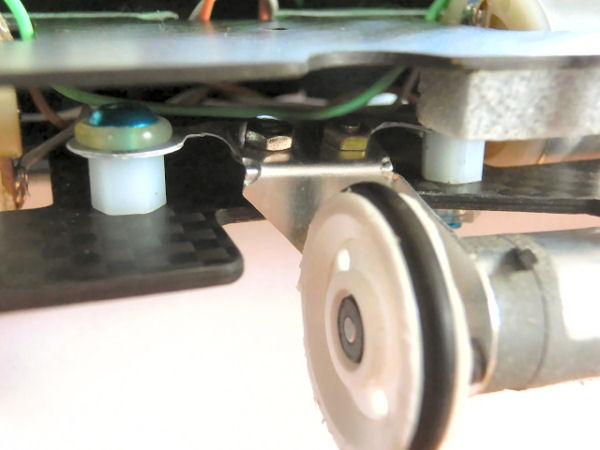
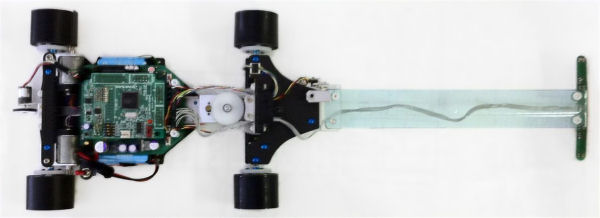
ラインセンサーが坂の頂上やコースの継ぎ目の段差で跳ねないように、センサーアームを輪ゴム(やバネ)の力でコースに押し当てることがある。
ラインセンサが跳ね難いことはライントレース制御には嬉しいが、輪ゴムの力だけ前輪の荷重が減ってしまうため車としては嬉しくない。
実際に輪ゴムを外したほうがアンダーステアが発生しにくく、タイムが出やすいため、Advance仕様の頃のロボットではセンサーアームの自重のみでセンサーをコースに押し当てる構成にしていた。
センサーの跳ねに対しては、坂頂上付近の速度を極端に抑える他は運任せにしていたが、あらためて考えてみれば、センサーアームを押さえつける必要のある時の大半は直線走行中で、前輪の荷重を増やしたい時は旋回走行中なので、操舵角度が小さい場合のみセンサーアームを強く押さえつける機構にしておけば良かったのかもしれない。
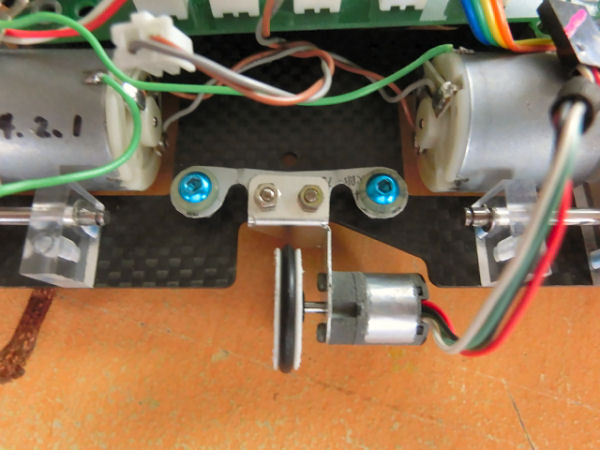
画像処理ロボットでは、コースの継ぎ目の段差には一切気にする必要がなく、
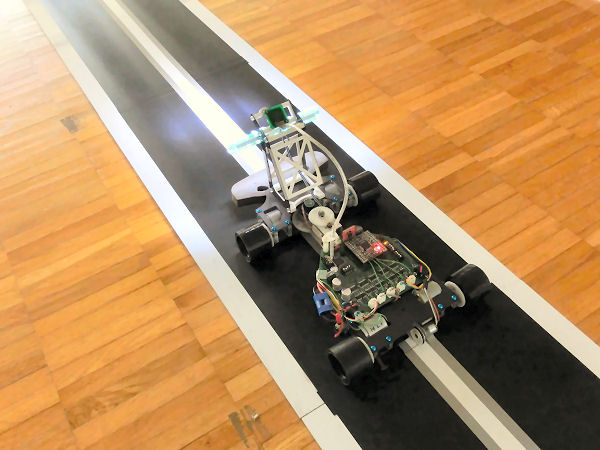
また、Advance仕様では無駄になっていたセンサアームの自重も、”やぐら”の重さとして前輪の荷重に使用することができる。