
Tさんの記事が読めるのはロボコンマガジンだけ。
前回に引き続きいて今回はソフトウェア編。
実際のソースコードと共にカメラの使い方と、その画像からのトレースライン+マーカの検出方、そしてライントレースのやり方を紹介しています。
pidream
IRカットフィルターをためす
セラテックジャパンのWEBカタログで赤外線カットフィルタを購入する
物としては1cm角のガラス薄板になるが、それに対して梱包はかなり厳重にされていた。
抜き取り検査時と思われる測定データも同梱されている。
個人では入手しにくい赤外カットフィルタを少数・低価格で提供してくれるのは有難い
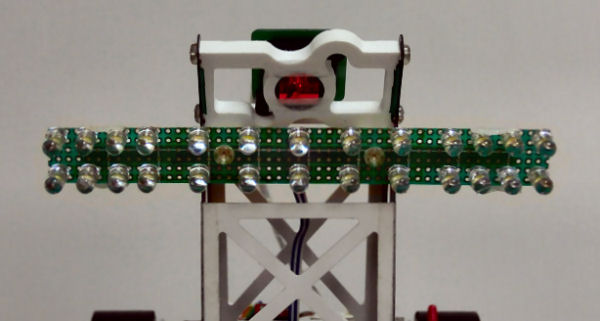
購入したのは[IRカットフィルター2]で、カメラM64285FPの分光感度のうち
白色LEDの発光色外である650nm以上をカットするようにした。
IR取り付けるべき向きは分からないので、とりあえずIR面をコース側にして取り付ける
なにがやりたいかと言うと
様々な光環境下でもカメラの出力がサチらないようにするために
太陽光のスペクトルを検出して絵が明るくなりすぎないようにしたい
よって、LED照明だけの時の絵の明るさから、変化が小さいほど良い。
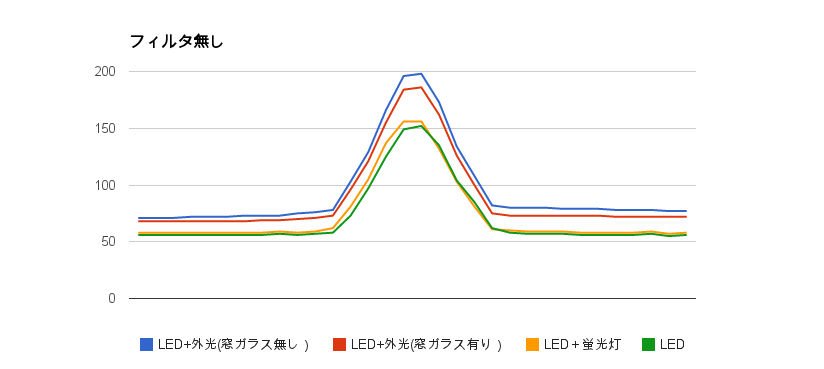
フィルター無しが↓で、
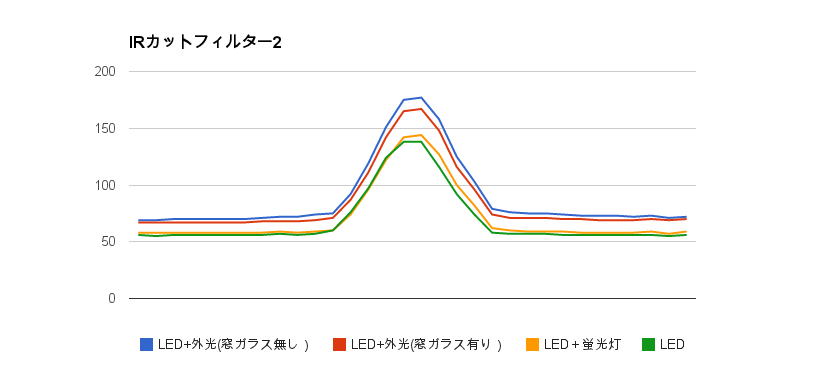
IRカットフィルタを付けると↓になる。
ちなみに、以前購入した太陽熱カットフィルムが↓
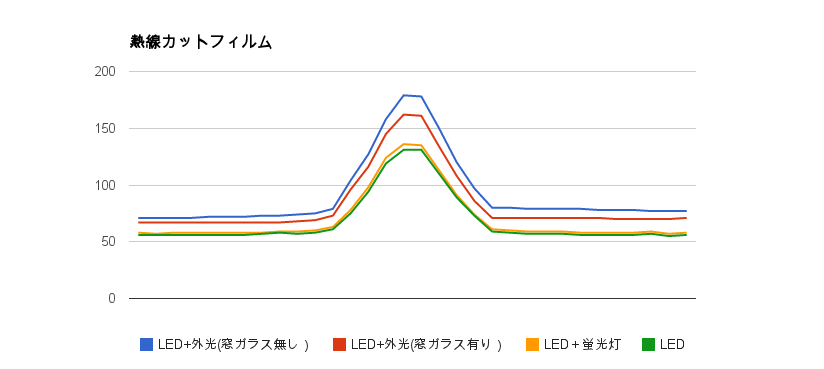
微妙に絵が暗くなるけれど、それ以外の差は分からない。
曇天(時折雨交じり)だったため太陽光が弱く、
赤外のスペクトルが低くなる傾向もあるようなので、
その辺の影響か?
//////////////////////
遅れていた参加手続きも完了。
コーナの曲がり方

画像右下の直線から左コーナに進入するとする。
最初は、直線からコーナに進入する区間で
減速をしながらコーナーに進入して行くことになる。
この区間でアンダーステアが発生する場合
前輪の過度なブレーキによるタイヤロックや
直線での速度の出しすぎによるヨー回転の立ち上がり遅延が原因になる
前者の場合には前輪のブレーキを弱くして対処する。
コーナ進入時のブレーキは殆ど後輪だけで十分である。
後者の場合、直線の速度を遅くするかセンサーアームを長くして操舵速度を緩やかにする
または、素早い操舵でも車体の応答がついて行くように、前輪のグリップをあげる(かホールベースを延長する)
前輪のグリップは、フロントヘビーに車体をデザインするが、減速により前輪への荷重を増やして実現する
その他、ライントレースの追従性が低い場合にもアンダーステアのような軌道で走ることもある

減速が終わり走行速度が目標値付近になる区間
減速から加速に移る時に急なパワーコントロールをすると姿勢を崩す。
前の区間での減速により後輪の荷重が減っているため、
後輪駆動車がここで急にパワーを掛けると直ぐにスピンに陥る。
ヨー回転の立ち上りが終わっていない場合、前輪のパワーを上げるとアンダーステアになる。
また、公転による遠心力が発生しだす区間でもあるため、
走行速度が早すぎる場合には負担の大きいタイヤから滑り出しはじめる。
静止荷重の大きいタイヤほど負担が大きくなるため、フロントヘビーの車はこの区間以降でアンダーステアが出やすくなる

ヨー軸の加速も終わり、走行速度も一定となった後に定常旋回を行う区間になる。
如何に綺麗な姿勢でこの区間にたどり着くかが大事となる。
車体の加減速によるステア特性の調整ができないため、
車体の基本特性を各タイヤのパワーコントロールで押さえ込んでニュートラルステアを保つことになる
前後のタイヤのうち負担の大きい方が滑りやすく、また、パワーを掛けすぎたタイヤから滑り出す。
この区間ではタイヤの限界を確認しながら、どのタイヤにパワーを掛けるかを調整して行く。
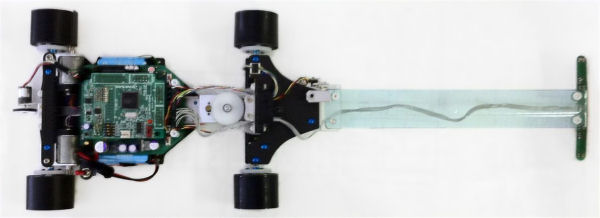
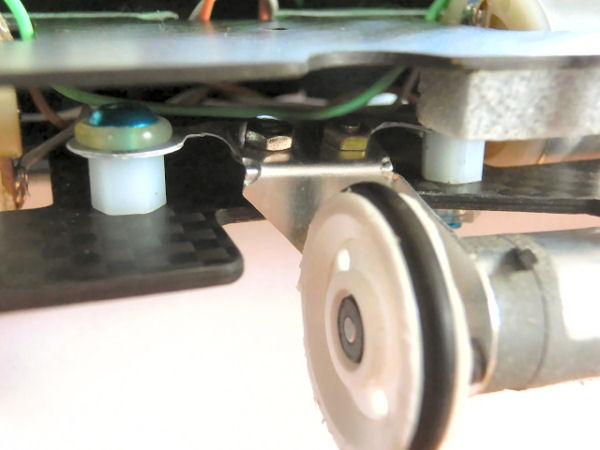
センサーアームの取り付け
言いたいことは既にCMA-さんがネタにしていたのだけど、ボツするのも勿体ないので公開。
ラインセンサーが坂の頂上やコースの継ぎ目の段差で跳ねないように、センサーアームを輪ゴム(やバネ)の力でコースに押し当てることがある。
ラインセンサが跳ね難いことはライントレース制御には嬉しいが、輪ゴムの力だけ前輪の荷重が減ってしまうため車としては嬉しくない。
実際に輪ゴムを外したほうがアンダーステアが発生しにくく、タイムが出やすいため、Advance仕様の頃のロボットではセンサーアームの自重のみでセンサーをコースに押し当てる構成にしていた。
センサーの跳ねに対しては、坂頂上付近の速度を極端に抑える他は運任せにしていたが、あらためて考えてみれば、センサーアームを押さえつける必要のある時の大半は直線走行中で、前輪の荷重を増やしたい時は旋回走行中なので、操舵角度が小さい場合のみセンサーアームを強く押さえつける機構にしておけば良かったのかもしれない。
画像処理ロボットでは、コースの継ぎ目の段差には一切気にする必要がなく、
また、Advance仕様では無駄になっていたセンサアームの自重も、”やぐら”の重さとして前輪の荷重に使用することができる。
ロータリーエンコーダの取り付け
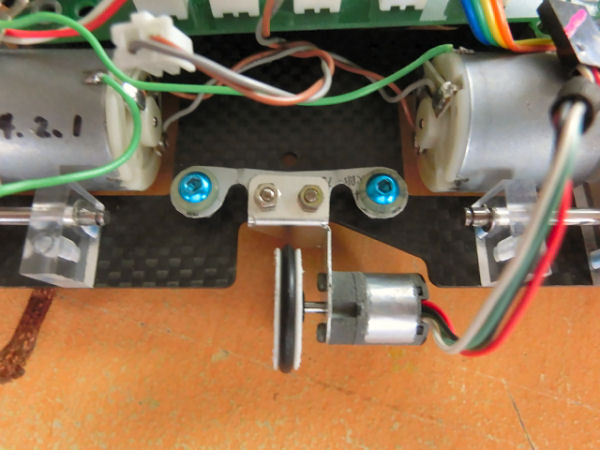
ロータリーエンコーダの取り付け位置は後輪の回転軸に近いほど良いと思っていて、件では後輪の回転軸からロータリーエンコーダの回転軸までの距離を1.5cm程に収めている。(advance仕様の頃の古いモデルでも2.5cm程)
後輪-ロータリーエンコーダまでの距離が離れていると何が困るかというと、
経験的に、クランク旋回中の距離測定が不安定になりコースアウトすることが増える。ロータリエンコーダのタイヤの表面が綺麗な状態では正しく測定できるが、埃がつくにつれて実際の走行距離よりも測定値が極端に短くなることが増えていく。
2005年に作った物や画像処理ロボットの初期の物は”後輪-エンコーダ間”距離が5cm近くあり、共に上記症状に悩まされた。
件ではエンコーダを後輪に近づけるために、ねじり棒ばね を用いてエンコーダを保持している。(写真または昔の記事参照)。また、後輪の面圧を低下させないために、エンコーダのタイヤは可能な限り弱い力でコースに接触させている。
再開

夏の競技会(大会?)の詳細が公開された。有難いことに今回も画像認識部門が行われるようだ。ということで、飛行機と宿の手配をして作業も再開する
春の競技会以来、原稿やら何やらでロボットを動かす機会が無かったが、その間にコースの延長工事が行われ、R450が連続する”面白い”レイアウトになっていた。
大会まで時間がなく大きな変更は無理なので、小手先の調整を始める。
操舵軸周りの部品をはめ合い接着剤で固定してガタを減らし、操舵軸の剛性をあげてみる。
現在の車体は車体前方の重心が高いため、旋回中には前輪外輪の負担が大きくなる。車体のねじれ剛性を高めて前輪外輪にかかる荷重を後輪外側にも分散させることが出来ないかと期待したが、実走行で変化なし。まぁ、そんなもんだろう。
久々に使うことになったUSBシリアル変換機も調子が悪い。
マイコンへの接続コネクタは劣化で壊れかけていたし、PC側もデバイスの認識が怪しい時がある
ROBOCON Magazine 7月号
Tさんの記事が読めるのはロボコンマガジンだけ。
電通大杯の懇親会でTMCCの皆様と話してた時に、画像処理マイコンカーを増やすにはどうすればいいか?→技術情報を公開して→Blogのネタで書いていくか→紙面に書いたほうが良い。ってな流れになって、その後、うさぎさんに相談してみたら話が進んでこうなりました。

文化祭でのマイコンカー部紹介ブース
インターフェース7月号
教授の記事が読めるのはインターフェースだけ。
10ページに渡りRCサーボモータの機構構造や通信インターフェース、制御特性が解説されている。後半では5種類のサーボモータに対して負荷(慣性重量)を変化させた場合の応答特性と消費電力の測定がされており、負荷が大きくなっても定速度回転に落ち着くまでの時間に変化があまり無いが、目標角度付近での収束性が悪くなることが示されている。
ちなみに、評価されたサーボモータはBasicクラス認定サーボとは違い、負荷もマイコンカーのレンジよりも小さい。この記事を参考に特性を取ると役立つような気がする

ギブアップ
倒立振子でのチャレンジを試みていましたが、夏までには作る時間が足りません。
//////////////////////
いつのまにか[MCR関連プロジェクト複製ツール]が動かなくなっているので、最新のHEWやR8環境に対応したいところ