大会を運営してくださった皆様ありがとうございました
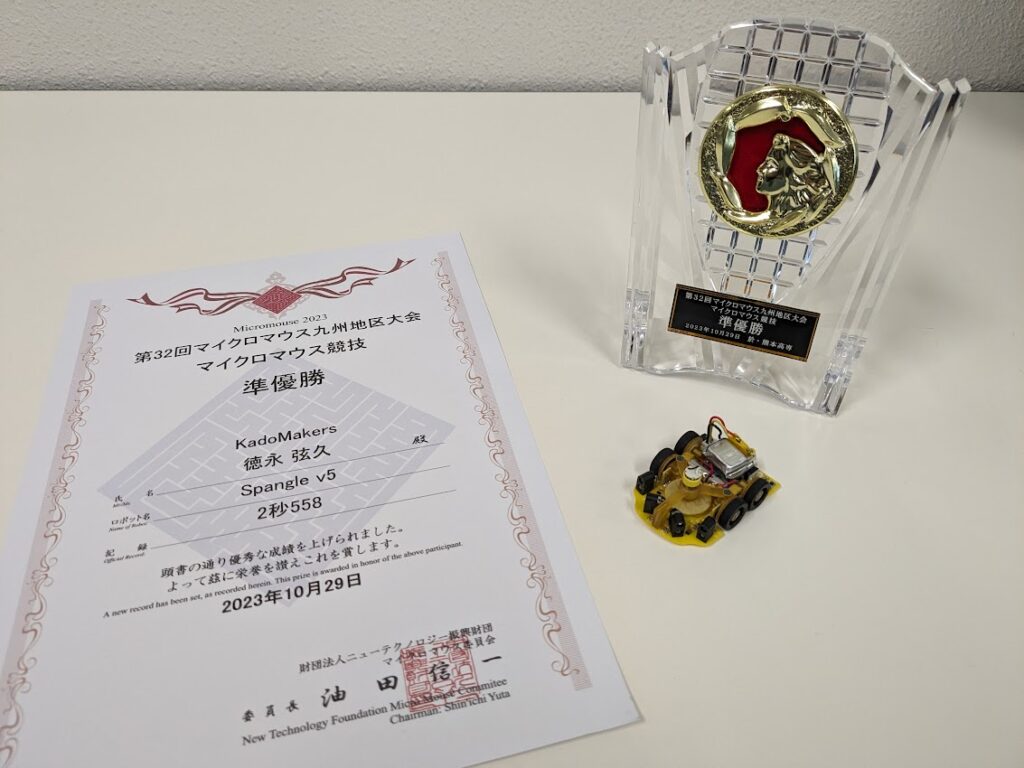
探索と目標にしていたパラメータでのゴールに成功しました。そして運よく3位入賞とベストマウサーを頂きました
この2週間前の大阪電気通信大学自由工房での試走で課題を出しきったおかげでもあります
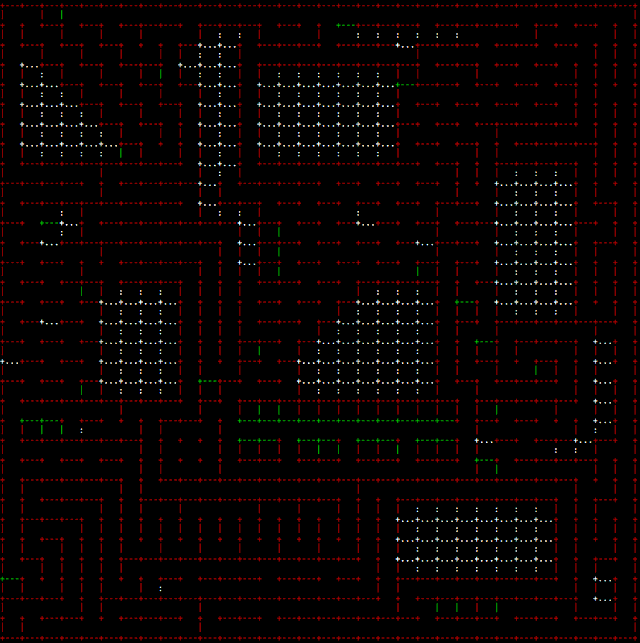
本番では久々に壁の少ない迷路の登場になり、探索走行ではほとんど全面探索になるほど振り回されました
2走目はベストマウサーの評価基準の「1回目のスタートから最初に操作者がロボットに触れた時までの最短完走時間を記録したマイクロマウスを評価する」の「ロボットに触れる」は物理的に機体に接触せずに例えば赤外線センサで操作するのは基準に適合するのではないか?などと思いながら(自立賞のノータッチにも同様の疑問)、探索完了後の7秒間に機体に外力(たとえば速度や回転)がなければ次の走行に移るロジックを実装したものが功を奏しました
3走目のパラメータは以下の値で予定していた最大パラメータです。九州地区大会よりも遅くしています
直線の最大速度は4.5m/s、加速度は25m/ss
斜めの最大速度は4.3m/s、加速度は22m/ss
ターン速度は1.4m/s



素晴らしい大会を運営してくださった皆様、ありがとうございました。