
DigikeyからDE0ボードが届く。大きさはDE1の半分位でコンパクト。
回路保護用?カバーの形状のせいで、プッシュSWの0番と1番が押しにくい。
pidream
ディジタルシステム設計技術者講座2日目


講座最後のスクーリング。
講義内容はタイミング制約や、NiosII IPコア、そして課題の発表。
これで半年ほどの講座は終了。
講座は終了したけれど、もう少し今の環境で勉強を続けさせて頂けるそうなので、講義の内容を習得できるよう復習を進める。
何人かの人に進められ、参加して見てとても楽しかった。コレだけの時間勉強できるのは久しぶりだし、動くボードに向き合えることは有り難い。
自前での環境整備も進める
こつこつ

ディジタルシステム設計技術者講座2日目までの課題を進める。
これだけ根を詰めて作業するのは久しぶりだ
作成したのはタッチパネルでお絵かき回路。
既に同様のサンプルがあったのだけども、そのアルテラIPのRAMを利用した回路が理解できなかったため、SRAMの代わりに99bit×69の配列を使って作成した。機能として[消しゴム]も追加した。
カメラモジュールやSRAMやFlashも使えるようになりたいが。焦るばかりだ。
scitecsmcrさんのような画像処理もやりたい
走り納め

27日に長崎工業高校さんの練習にお邪魔し、昨年最後の走行をさせて頂いた。
60m超のテクニカルなレイアウトのおかげで、今まで確認が取れなかった箇所の特性やバグを発見できた。
気づいた一つに、駆動モータの制御量。
良い動きをしている場合の制御量は、より簡単な制御で等価できる。
ある程度の外乱までは後者の方がパフォーマンスに優れる。
今の制御は本当に必要なのだろうか?過去の実績に囚われているのではないか?
このヒントを得るためにどれだけの時間を費やしてきたか。逃がしてなるものか。
ディジタルシステム設計技術者公開講座1日目

5月から続けているデジタル回路の勉強に岐阜高専に行く。
講座では液晶、タッチパネル、CCDカメラの回路に触れることができたが、
理解が進んでないのでコード全体の把握はできず。
2回目の講座のために年末年始は詰めて学習をしよう
九州地区大会
・光栄にもエキジビションに呼んで頂く。
・コースの難所は車線変更脱出後60cmからのコーナ。ライン追従制御の強靭さと脱出直後の安定性を試されるようで、この箇所での不安定な動作やコースアウトが印象的だった。
・Basic Class宮崎県代表の走りが素晴らしい。
九州地区県大会
先月中旬からの九州地区県大会に行っていた。
熊本ではTsubameさんと共にミニ試走会に参加。
・追加機能のテストを行うも、エレガントな実装をされていたN村さんのほうが0.1S以上速い。
・試走会のトーナメントでは運良く優勝してお土産を頂く。ありがとうございました
福岡ではエキジビション。
・直線での速度を上げてもタイムが縮まらない。5m/s以上の速度はタイム短縮に効果が少ないのではないか?
九州地区県大会でのレイアウトは
同タイムのロボットどうしで走った場合に併走する箇所が多く見ていて面白い
(スタート直後-車線変更付近-2週目ホームストレート-2週目車線変更付近ーゴール直前)

白黒反転&中央線無し区間の走り方

RMCR2010で新たに追加された白黒反転区間と中央線無し区間について、その走り方。
「デジタルセンサマシンとしてトレースを行う(上図参照)」
このようにトレースをすることで、
1.両方の区間を同一のトレースロジックで走行できる
2.反転区間の開始、終了時にトレースが乱れることがない
3.中央線無し区間終了後にセンサが大幅にズレていた場合に、穏やかな操舵で操舵をきることができる(アナログトレースの場合に急操舵になりがち)
/////////////////////////////////
反転区間については事前に長崎工業さんで手押し動作確認を行わせて頂きました。
MCR関連プロジェクト複製ツールVer.1.20
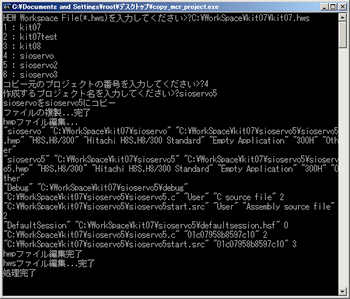
○コレは何か
HEWのプロジェクトを複製するソフトウェアです。
○具体的に何ができるのか
マイコンカーラリー公式ページで公開されているルネサス統合開発環境H8/3048関連プログラムと同じ構成のプロジェクトファイルを複製します
R8Cのワークスペースには対応していません
○使い方
使い方
○更新内容
hwsファイルとhwpファイル内でディレクトリの大文字小文字が異なっていた場合に対応
(具体的にはworkspace141のanaservo_ver2でWorkSpaceとWorkspaceの差に対応)
○動作確認したHEWのバージョン
Version 4.00.03.001(講習会CD等で配布されたもの)
Version 4.02.00.022(作者環境)
○複製に失敗するワークスペースもあります
・hwpファイルと同階層にtypes_beep.c以外に2つ以上の.cファイルがあると失敗します
・hwsファイル、hwpファイルのデータベースバージョンより失敗する可能性があります
○ダウンロード
動作報告、不動作報告お待ちしています。(電話、メール、伝言可)
RMCR2010
RMCR2010終了
結果は3位とベストタイム賞
F澤さん(優勝)、junさん(ルネサス賞)おめでとうございます。
○試走日 8/21
・会場入り、みなさんお久しぶりです
・反転区間の場所は予想通り
・出遅れたため、試走は3回になった
・シリコンシートの寸法を間違えて長さが足りない→MMC07さんに分けて頂く
・1回目:コースのグリップ及び反転区間の実コースによるシェイクダウン→グリップ良、ロジックOK
・2回目:コーナの設定を変え確認→改善できず(仕様による特性)
・3回目:下さか直後のクランクで、クロスライン検出後にセンサバーが跳ねる→略→センサバーが4分割される。これが逆境だ!
・予備部品を持って来なかった事が間違いだった
・ほぼ同じ寸法のセンサバーを貰い交換する
○大会当日 8/22
・早めに開場に到着
・試走1回目:前日の事もあり可也の不安の中走行→15秒中盤で完走
・F澤さんが頭一つ抜けたタイム
・junさんも頭一つ抜けたタイム。やっぱりそう来たか
・試走2回目:パラメータ上限での走行→4位で予選通過
・E藤さんのロボット、アッカーマンはカッコいい。マクソン流星ギヤのガタをベアリング仕様と固定方法で殺していた。前日に聴いていたスペシャルな駆動モータも見せてもらう
・トーナメントが進む毎に気力がすり減ってゆく。何度やってもコレばかりは慣れない
・E藤さんやstikkさんと対決。
・ベスト8も常連さんばかり、このカードを見るのは何度目だろうか
・準決勝:相手はjunさん。設定上限、リミッター解除、AWDモードに変更。これ以上は設定できない。→あと30cm?及ばず。15秒を切られたら仕方がない。
・3位決定戦:相手はN村さん。上限で挑む。→14.94s
・空港にてロボット搬送箱を手荷物として預ける→箱使用不能になる
終わってみれば運や人に助けられ表彰状を手にすることができました
大会事務局やスタッフの皆さん、参加された皆さん感謝します。