「エンジニアは蟹」論 - Life is beautiful:
http://satoshi.blogs.com/life/2005/07/post_4.htm
>エンジニアは蟹だ
>何年かに一度脱皮をする蟹だ
>
>新しい技術を取得するために
>時代の変化に対応するために
>古い殻を脱ぎ捨てる蟹だ
「エンジニアは蟹」論 - Life is beautiful:
http://satoshi.blogs.com/life/2005/07/post_4.htm
>エンジニアは蟹だ
>何年かに一度脱皮をする蟹だ
>
>新しい技術を取得するために
>時代の変化に対応するために
>古い殻を脱ぎ捨てる蟹だ
日程が早くなった大会にあわせるために、計画を変える必要がある。
新規で作るには時間が足りず、現行では物足りない。
妥協案として、
・AWD用に製作する部品を現行モデルに流用
・新規のハードや処理を現行モデルに取り組み検討
工数を増やさないため、必要箇所以外には手を出さない。
///////////////////
プレゼン作製
JR手配
素子発注
寸法決定
コード書き
5/9(土)に大阪電気通信大学自由工房で行われるオープンセミナーでプレゼンの機会を頂きました。
それにあたり、発表内容のリクエストを募集します。コメント欄やメールフォームでどうぞ。
時間は1H~程度を考え、現時点での構想は以下の通りです。
・なぜコースアウトするのか
・jmcr2009モデルの構成
・コーナの走り方
>狙い
>ポジションセンサ
>モータドライバ
>旋回中の制御
・車線変更の走り方
>狙い
>走行中の制御
>パラメータの詰め方
・クランクの走り方
>狙い
>走行中の制御
>パラメータの詰め方
リクエスト内容より
・ライントレースの方法
>トレース用センサ
>追従制御
・2WDとAWD
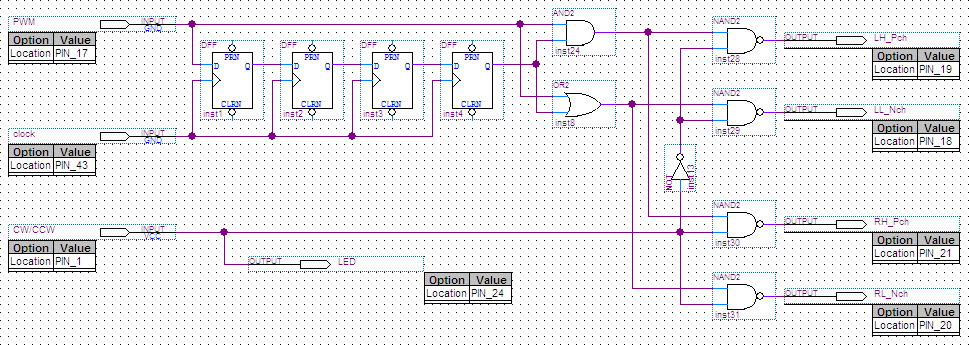
これがこう↓なるはず。
// moter_drive01
module moter_drive01(ck,pwm,cw_ccw,Lp,Ln,Rp,Rn);
input ck,pwm,cw_ccw;
output Lp,Ln,Rp,Rn;reg [3:0] shift_pwm;
//4clock shift
always@(posedge ck) begin
shift_pwm[3] <= shift_pwm[2];
shift_pwm[2] <= shift_pwm[1];
shift_pwm[1] <= shift_pwm[0];
shift_pwm[0] <= pwm;
endfunction [3:0] outport;
input [2:0] outport_in;
case(outport_in) //pn pn
3’b 000: outport = 4’b11_11; //XO XO
3’b 001: outport = 4’b10_11; //XX XO
3’b 011: outport = 4’b00_11; //OX XO
3’b 010: outport = 4’b10_11; //XX XO3’b 100: outport = 4’b11_11;
3’b 101: outport = 4’b11_10;
3’b 111: outport = 4’b11_00;
3’b 110: outport = 4’b11_10;default: outport = 4’bxx_xx;
endcase
endfunctionassign {Lp,Ln,Rp,Rn} = outport({cw_ccw,shift_pwm[3],pwm});
endmodule
//////////////////////
DigiKey検索プラグインを更新

05年モデルの動作確認を終えて出荷した。
次のモデルを作るために、環境を見直す。
・Verilog練習用のPLD関連ボードを一枚板に固定
・Quartus II Web Edition を 9.0 にアップデート
//////////////////////////////////
DigiKey検索プラグインが動作しなくなっているため、要修正

2005年モデルの修理を進める
今回でCPUボードとメイン基板を新調したため、当時の部品は足回りしか使われていない。
05年モデル初期頃の外観
ttp://www.mcr.gr.jp/tech/report/pdf/004tokunaga.pdf
覇者の条件
JMCR2003の一般の部の優勝ロボットは青嵐である。
私がこの競技に参加したのは、その走行映像を見たからであり
その鋭く、何処までも加速する直線走行や、減速を感じさせない旋回走行。
今でもその劇的なパフォーマンスを覚えている。
性急でなくて誰が感動する
人は感動によって動くのです
一般の部の覇者にはそういった物が必要だと思う。
「ハズレを引かない」だけでは相応しくない。
///////////////////////////
ロボコンマガジンNo.62購入。
色々と思うことはあるけれど、七年越しでやっと掲載された。
おかげさまで、一般の部で優勝することができました。
詳細&レポートは後ほど書きます
/////////////////////////////////////////
・サーバ&ドメインの更新手続きの案内が届く
・控え室、隣は十万石クラブさん
・開会式、「選手以外の人も前にきて、一緒に盛り上げましょう~」というアナウンスが印象に残った
・予選コースレイアウト公開され眺める。長い直線の後には、R600コーナやクランク前1mにクロスラインがあり、後輪駆動でも走れそうなレイアウト
・走行順番は苗字の五十音順、九州大会のような名前でソートではなかった
・アドバンスA,B組の予選をビデオカメラのモニター越しに観戦
・招集時間直前に、下り坂センサを不注意により壊す
・招集の行列の中で瞬間接着材と紙テープで修理するが、検出精度悪し
・予選開始、常連&強豪のコースアウトは全国ならでは
・Bコースのアナウンス
・Taroさん速い
・strvさんのロボットがスタート検知できなかったとの事
・走行順になる
・スタート検知用のKU381-80の反応がおかしい
・手動スタートを覚悟して、SWに直に手を伸ばせる体勢でスタートを待つ
・一瞬送れたようにも見えたが、自動スタート成功
・完走後のタイヤを確認。後に控えている人に見せる。
・上位の2人のタイムは16秒台
・予選上位8人中6人が九州
・決勝コースレイアウト公開:変更上り坂後のクランクがある
・十万石クラブさんの話で、連続車線変更に気付く
・車線変更後に次のハーフライン、クロスラインを探すまでのタイミングを早める
・地区大会から、このタイプの組み合わせに対応できるようにパラメータをあわせていた
・車検場での待ち時間、アドバンスのトーナメントに異常に時間が掛かっている(後に再レースのためだと判明)。腰が痛くなってきた。
・トーナメント開始:連続車線変更で多くのロボットがコースアウト
・決勝トーナメント1戦目:予選と同じパラメータを設定。上り坂後にジャンプしクランクで不安定になる。
・決勝トーナメント2戦目:相手はTMCCコーチ、直線速度を下げ旋回走行系の設定を上げる
・ベスト8中5人が九州そして、アナログセンサ系4台、デジタルセンサ4台
・車検場で、junさんに色々質問
・車検場でのレギュレーション厳しくなりました?
・決勝トーナメント3戦目:ここだけ九州大会。現状のタイムでは負けるので設定を上げる
・決勝トーナメント準決勝:ここでも九州大会。如何足掻こうと勝負にならないので設定そのまま。同タイムがでるが、ランサーがコースアウトしたとのこと。コチラもいよいよ後輪タイヤが無くなる
・決勝トーナメント決勝戦:ここでも…。後輪を考え、同設定で走行
・エキシビション:坂の頂上で止まらず坂後のクランクでコースアウト
直接、間接、参加多くの形でありますが、共に素晴しい大会運営してくださった皆様、また、当方の開発に協力していただいた皆様に多謝
結局平日は何もできず。
@6:30:準備開始
@7:00:シリコンシート切り,工具準備完了
@7:20:ノートPC準備
@8:00:デジカメ,梱包etc完了
@全国大会専用特別処理再実装,DIPSWによるパラメータ設定項目追加
@夕食はスープカレー
@前回までの谷のスロープの長さは110cm程度
事例紹介
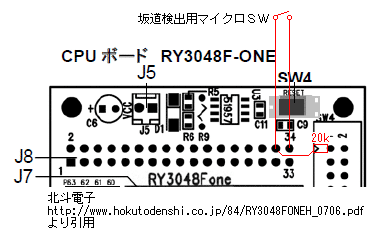
坂道検出用のマイクロSWへの電源供給としてJ6コネクタの1番ピンから20kΩの抵抗を通して5V、J8コネクタ34番ピンをGNDとして用いたところ。走行中かつマイクロSWが切り替わる場合にマイコンがリセット動作するようになった。
走行していない場合や、常にSWがONの状態、OFFの状態ではリセットしない。
走行中5Vラインがリセット動作の範囲付近で暴れている状態で、さらにマイクロSWの切替による負荷の変動が追加され閾値を越えた為と考えられる。
GNDラインは変動していないと仮定して、5Vの生成箇所直近から5Vを直接マイクロSWに供給し、そしてSWから39kΩの抵抗を通してGNDと入力端子に接続したところリセットすることが無くなった。
//////////////////////////
ついでに、
リセットIC付近の電圧変動を抑えるため、
・c11にパラでコンデンサ追加
・J6コネクタ1番ピンとGND間にコンデンサを追加
{kind=link}
{kind=link}
{kind=link}
{kind=link}