事例紹介
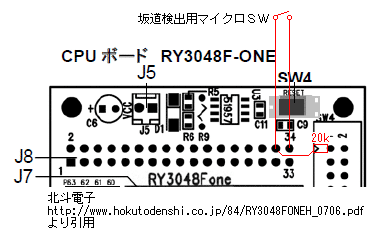
坂道検出用のマイクロSWへの電源供給としてJ6コネクタの1番ピンから20kΩの抵抗を通して5V、J8コネクタ34番ピンをGNDとして用いたところ。走行中かつマイクロSWが切り替わる場合にマイコンがリセット動作するようになった。
走行していない場合や、常にSWがONの状態、OFFの状態ではリセットしない。
走行中5Vラインがリセット動作の範囲付近で暴れている状態で、さらにマイクロSWの切替による負荷の変動が追加され閾値を越えた為と考えられる。
GNDラインは変動していないと仮定して、5Vの生成箇所直近から5Vを直接マイクロSWに供給し、そしてSWから39kΩの抵抗を通してGNDと入力端子に接続したところリセットすることが無くなった。
//////////////////////////
ついでに、
リセットIC付近の電圧変動を抑えるため、
・c11にパラでコンデンサ追加
・J6コネクタ1番ピンとGND間にコンデンサを追加