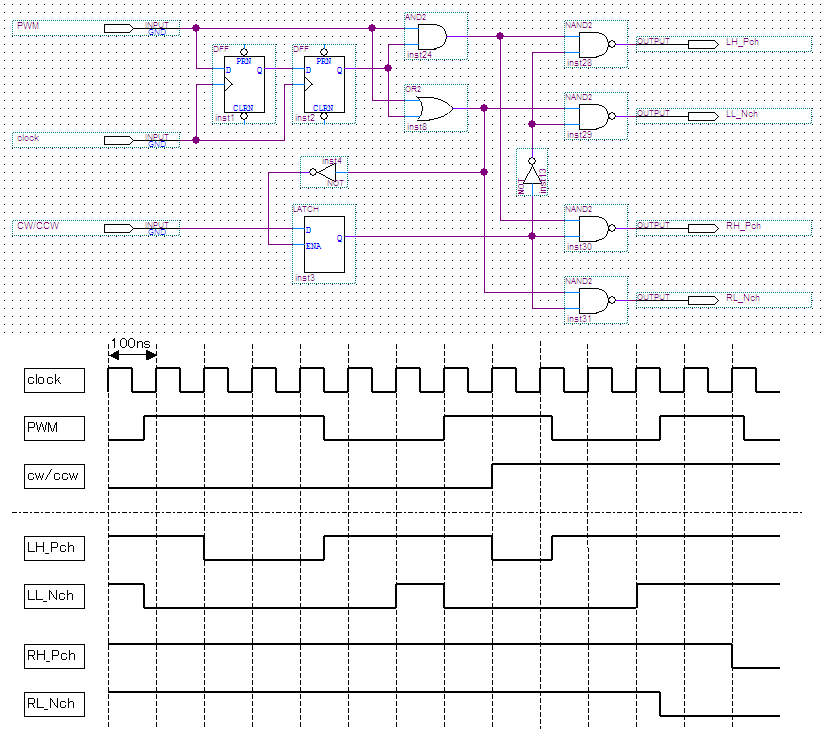
モータドライブ回路を描く
・デットタイムは100ns以上
・clockには10MHzを入力
・各出力は非反転ゲートドライバを通してFETに接続
ピン・アサインの設定はしていないが、コンパイルは通った。
ゲート遅延を無視すると、下のようなタイミングチャートになるでしょうか?
pidream
MCR関連プロジェクト複製ツールのソースコード公開
MCR関連プロジェクト複製ツールのソースコード公開する。
久々にプロジェクトを開いたところ、読めなかった。そういうわけで、管理できないので公開することにした。
・ActiveBasic 4.23.00で製作
・コンパイル時に警告が大量に出るが動作する
・スパゲティ
MCR関連プロジェクト複製ツールのソースコードのダウンロード
【関連】MCR関連プロジェクト複製ツール
CPLDメモ2
5V動作で44ピンのCPLD
・EPM7032SLC44-※
・EPM7064SLC44-※
※スピードグレード:小さいほど高速動作
入手性と値段
アルテラなので手元にあるトラ技やweb上の資料が良
Quartus II Web Editionも導入済み
【販売】
PLDコ-ナ-@F-SHOP!
http://www.hdl.co.jp/tuhan/ptuhan_4.html
http://www.wakamatsu-net.com/cgibin/biz/page.cgi?cate=3805&page=0
http://www.e-netten.jp/eleshop/cgi/search.cgi?syou=CPLD
【参考】16.ALTERA CPLD 7032Sテストボード@TekuRobo工作室
////////////////////
ダウンロードケーブル
ストロベリー・リナックスのPLD-PGMキット
////////////////////
Quartus II Web Editionのライセンスを日本アルテラから再度取得
送られて来たメール3通(ライセンス、新製品情報、ニュースレター)
新製品情報の配信を処理tp://olm.altera.com/myEmailSubscriptions/viewSubscriptions
【関連】CPLDメモ
CPLDメモ
マイクロマウスでは一般的だが、PIC利用の割合が高いMCRでもPLDを見る機会が増えてきた。
手元にトラ技CPLDがあるが、実際の利用目的がないため弄ることは無い。そこで、MCRロボットの基板への導入を目的として考えた。
3chのモータドライブ回路までなら実装面積に優位性は無いが、素子数の低減は信頼性・保守性の向上につながりそうである。
ということでメモ
5V動作で44ピンのCPLD
・XC9536
・XC9572
価格は650円程度
パッケージはPLCCタイプが便利
PLCCソケットのサイズ:23.5×23.5
実装高さ
・リード:8mm
・面実装:5mm程度
ダウンロードケーブルの検討(購入or自作)
アルミシャシ
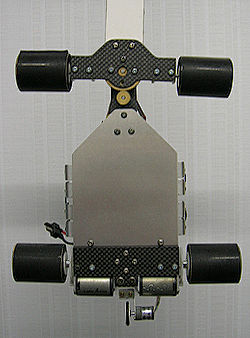
持ち出される度に酷使される2005年モデルの修理/改装を行う。
・組電池を止め電池ボックスを搭載
・使用不能になった操舵系部品の置き換え(昨年使用した部品から)
・上2点により、必要になったメインシャシの交換
カーボン材が無いので、メインシャシの材料に1.5mm厚の5052?を使用する。
弾性係数と厚さで剛性向上。1mm厚で十分だったか。
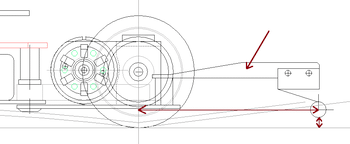
ついでに、現行モデルのシャシを置き換えた場合の重量も計算
1mm厚カーボン+バラスト < 1mm厚アルミ
///////////////////////
九州地区大会ベスト32を見ると、4駆・4独モデルの割合が目立つが、
アナログセンサロボットの操作系ギヤボックスの自作割合も高くなっている。
継ぎ目に救われる
本来ならコースアウトするだろう直線走行速度で完走できたのは、下り坂センサの誤検出のおかげだった。
試走開始、パラメータを徐々に上げなが走行確認を行う。
ただ、以前から誤検出の目立っていた下り坂センサが、ホームストレートの終盤で毎回反応していた。
結局、パラメータを最大まで上げても13.8xで安定走行を行うが、地区大会べストタイムには及ばず。
仕方ないので、プログラム上で最高速度を引き上げる。タイムが向上するも、ベストタイムにはまだ及ばず。
こうなると自棄。最高速度指定を撤廃する。各所で不安定になるがコース上には留まる。
そしてレース開始。
////////////////////
運もココまで、
帰り道、バスセンターまでの道中でキャスターバッグのキャスターが壊れ、
バスからの更新の際にAIR-EDGEのアンテナを紛失する。
やってきました熊本工業
なにかあれば、覚えている間にどうぞ

このコース辛いなぁ
///////////////////
しまづさんが13秒代で周回
///////////////////
コースの継ぎ目が目立つが、これ以上継ぎ目テープを貼ることはないだろうとのこと
//////////////////
九州大会完走を目指します!by Tsubame
//////////////////
受付開始、そろそろ試走
ゼッケン番号は42、なかなか良い走行順。
Tsubameさんはランサーと同じ走行順。
////////////////
Aコートで競技開始
1走目:13.6?
2走目:13.59
エキシビション:13.49
///////////////
1位:SPANGLE
2位:ランサー7号
3位:セリカレン
///////////////
なんとか13秒代中盤で1位。かつて設定したことの無いパラメータで無理やりタイムを出す。北信越や東海の覇者には届きそうに無い。
//////////////
高校生の部の試走を途中途中で見学する。
目立っていたのは、
球磨、天草、御船、宮崎、塩田、福岡
14秒代での周回も数台。
ベスト32のボーダーは16秒フラットになりそうである。
九州地区大会前日
・シリコンシートの張替え
・バッテリの充電(ロボット&ノートPC&携帯)
・福工で下り坂処理の動作チェック。またバグが見つかる
//////////////////////
明日は会場から(時間とAIR-EDGEの都合が付けば)実況するかな
リセットが止まらない場合の最後の手段
去年、一昨年と毎年お世話になっているルール。リセットによる停止の予防になるが、同時にコースアウトによる大破の可能性も向上する。
JMCR2007全国大会の予選でも周回中にリセットを起こしたが、なんとか完走できた。
起動時に一定以上車速があれば走行モードに移行する。
起動(リセット)後100ms以内にエンコーダからの入力が閾値以上なら走行モードに移行する。移行時には、再度のリセット発生を抑える為に、各パラメータ(最高速度、最高PWM率etc)を低めに設定し直す。
通常走行に復帰するだけなので、クロスラインやハーフライン進入後にリセットが起きると、対応できず大破につながる。余程差し迫った状況で無いと導入できない。
今年こそ、このルールに世話にならずにシーズンを終えたい。
【関連】
リセットの原因
毎日こつこつ(2006/12/17)
毎日こつこつ(2006/12/16)
////////////////////////////
・下り坂判定&処理を、誤作動の影響が小さくなるように変更。
・軽量化のために取り外していたノートPCのバッテリを発掘。
登り坂検出用リミットスイッチの導入時に気を付ける3つの点
・路面とセンサ間の高さを大きく取る
路面の段差によるスイッチの動作を防ぐ。
・タイヤ軸中心からセンサ間の距離を大きく取る
上り坂時の変位を大きくして、スイッチを動作させる。
長時間動作させることで、フィルタ処理を容易にする。
・センサ固定部には適度※な弾性を持たせる
登り坂でスイッチが死点に入ったときの、タイヤの接地を保つ。
※固定部自身の振動でスイッチが誤作動しない程度
【関連】
坂道検出
///////////////////////
ログの回収と検討を行う。
下り坂センサの路面の段差での誤検出が目立つ。”変化は大きく、感度は低く”が実現できないので、誤検出自体ではなく、その影響を抑えることを考える