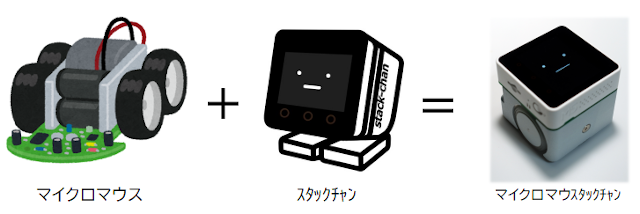
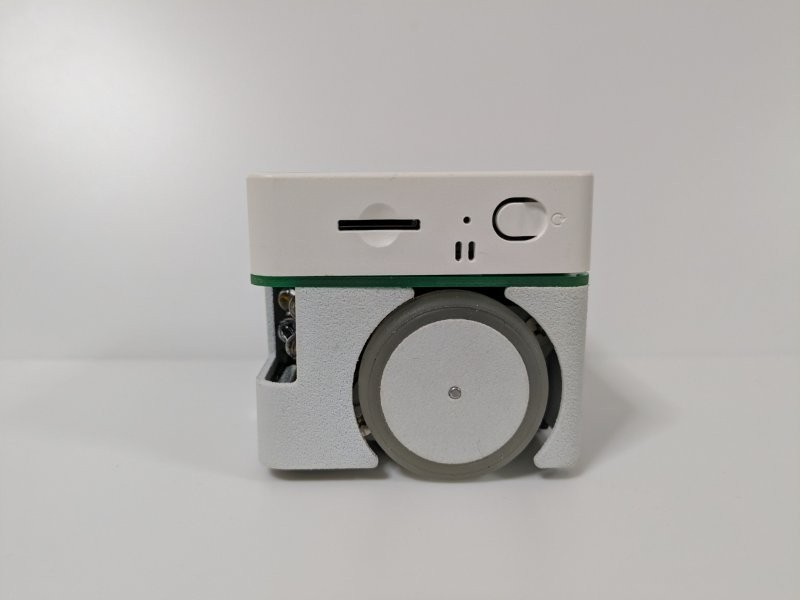
マイクロマウスタックチャンはスタックチャンとマイクロマウスが合体したスーパーカワイイロボットです。
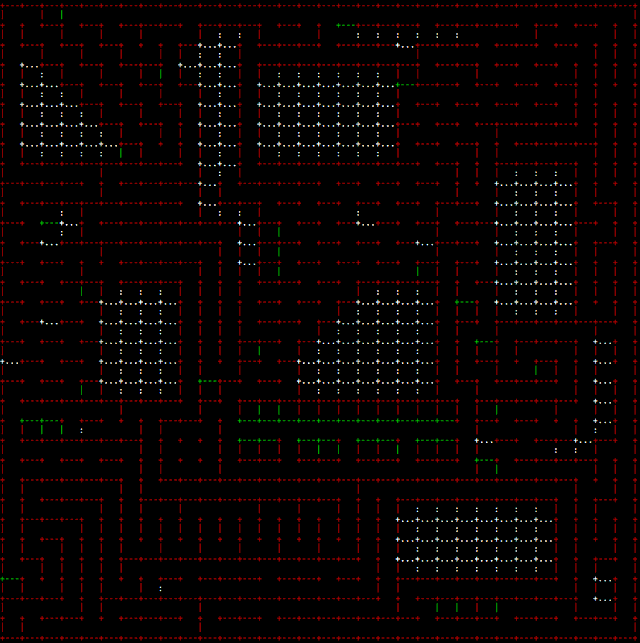
こんな感じで迷路を走り回ります
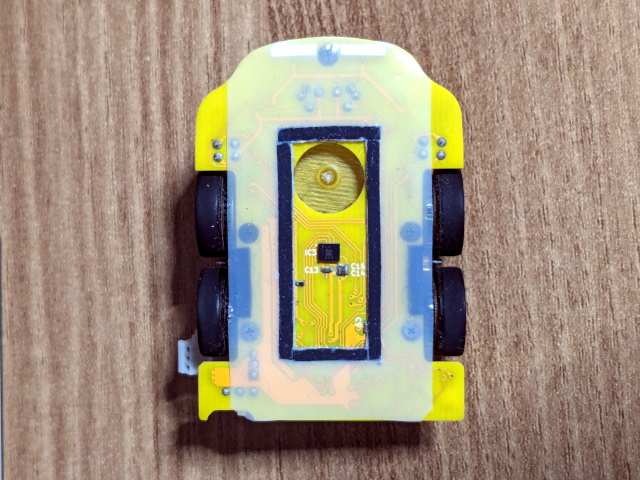
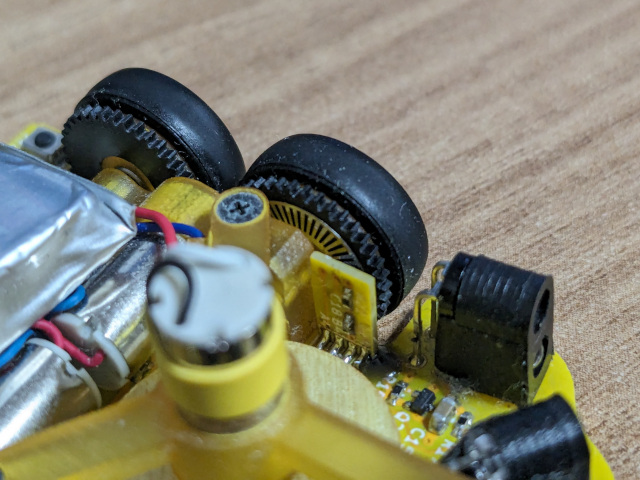
マイクロマウスタックチャンはM5Mouseをリスペクトしたロボットですが、M5Mouseと違い駆動系を含めてM5Stackのみで制御しています。また、電源もM5Stackに搭載されているリチウムイオン電池1セルで動きます。
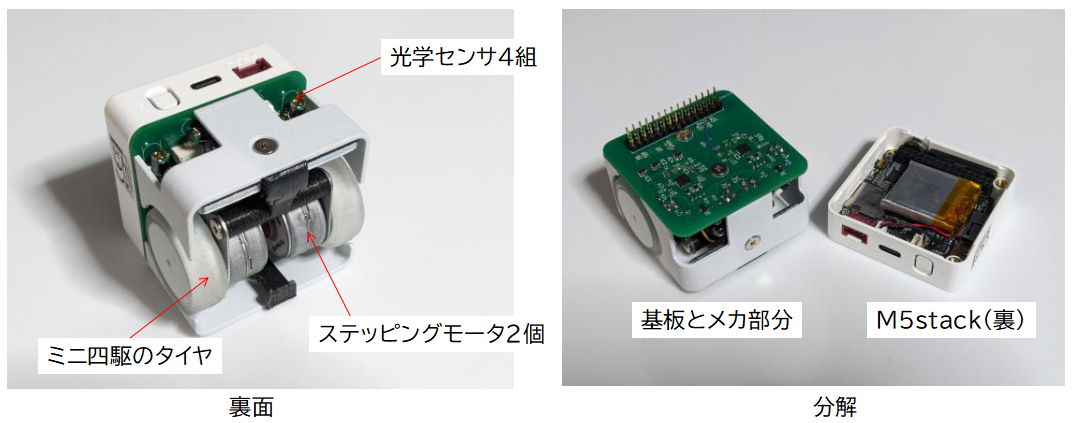
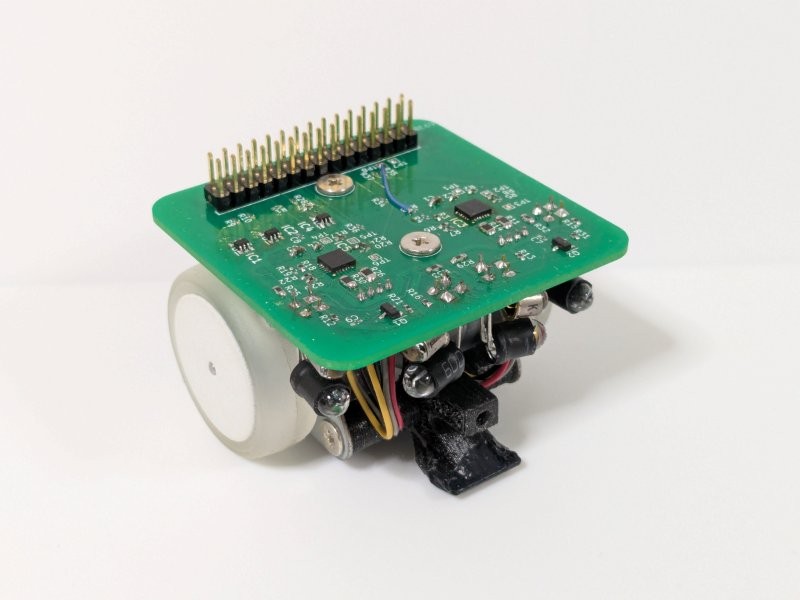
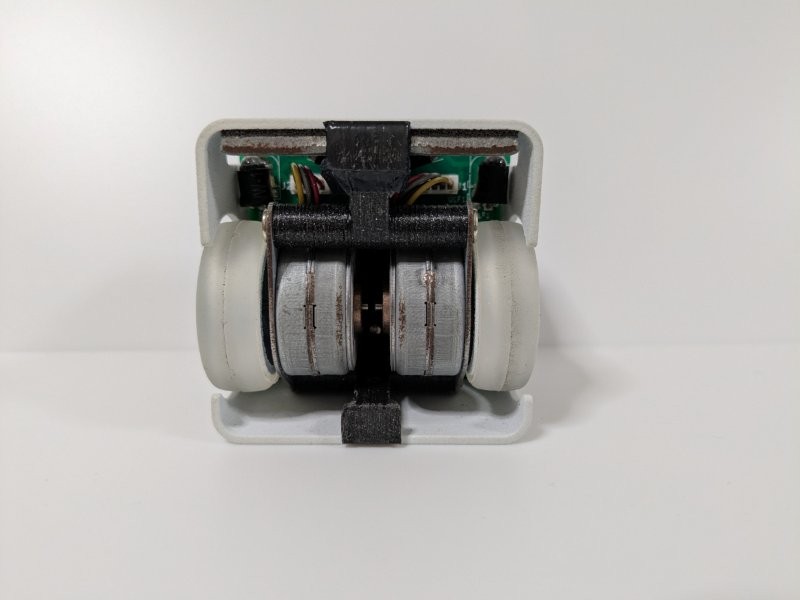
M5StackのIO数でやりくりするために、モータはステッピングモータを利用してモータ制御に使うIOを4ポートに抑えています。また、前後左右の壁センサは[右前&左横]と[左前&右横]の2組のセンサをマルチプレクサで切り替えて使用することで、ADCポート2個と切換え信号、赤外線LEDのON/OFF用の合計4ポートに抑えています。
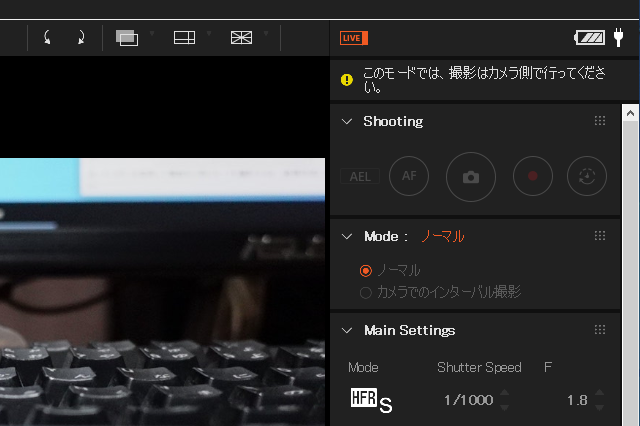
スペックシート
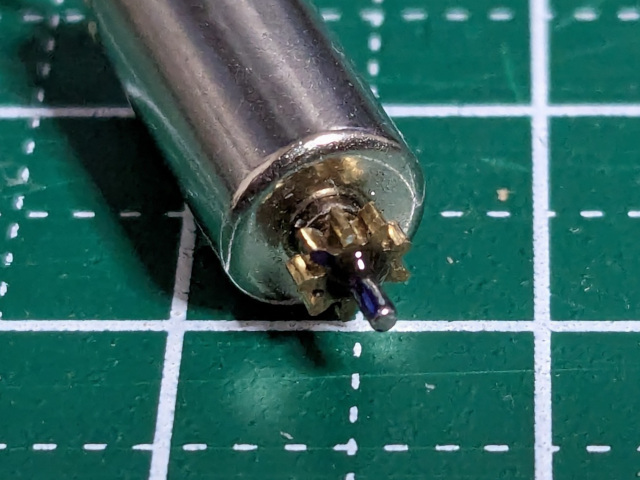
スペックシートのモータは品番間違いでPortescap 26M048B1Bを搭載
回路図
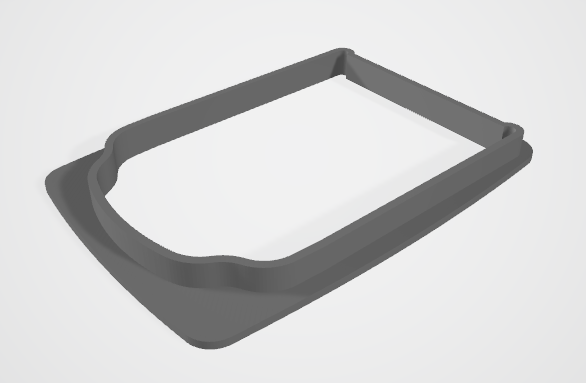
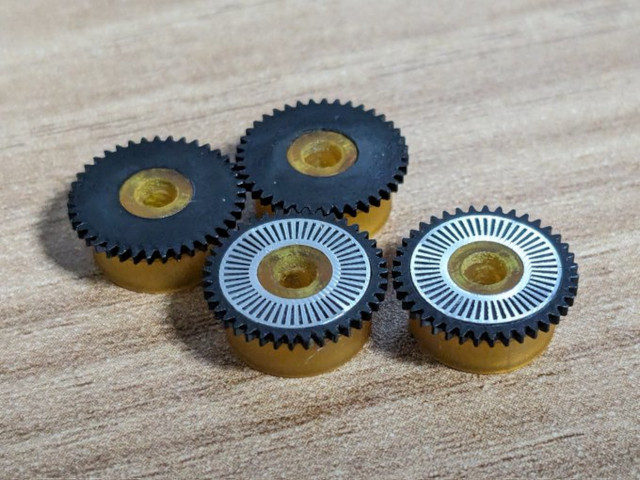
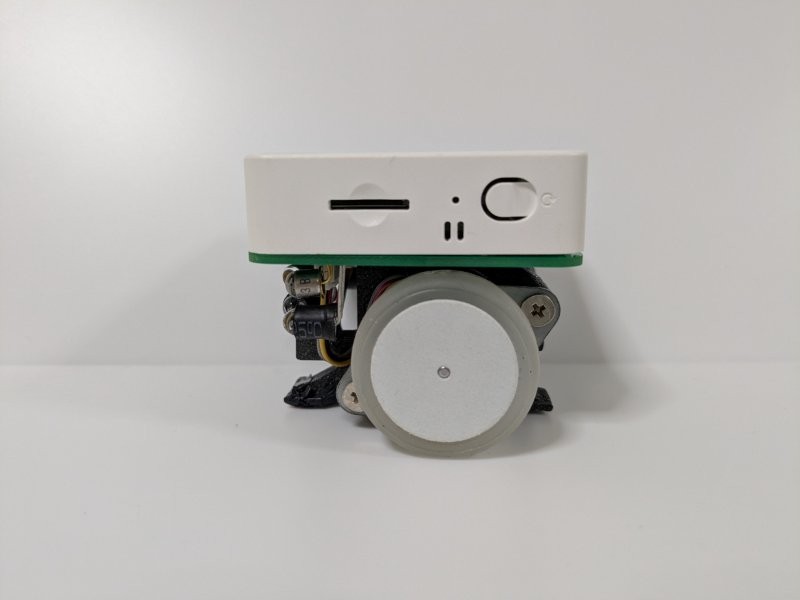
タイヤ:ミニ四駆グレードアップパーツ No.366 大径カーボンホイールセット(ソフトスリックタイヤ付)
ソフトウェアhttps://github.com/pidream/moustackchan01




関連機体:マイクロマウスタックチャン(響CMスタックチャン)
関連機体:マイクロマウスタックチャンハーフ化計画
雑誌掲載:I/O 2025年7月号 page 19-20