
大会でその違いに悩まされた新素材コース。
今まで灰色の色の違いだけを考慮していたが、クランクへの進入限界速度の大幅な低下により、そのグリップの違いを実感したので、中川ケミカル793を購入し、対策を練ることとした。
コースの作り直しは来週末にするとして、その概観を示す。
写真では白く見える色は、実際にはつや消し処理のために黒が濃く見え、表面も若干のザラザラ感がある。グリップ力の低下はこのザラザラ感が原因だろう。
耐久性は高いようで、エコパレットのように簡単に傷つくことはない。これはコース作成や管理にとっても好都合。
pidream
坂道検出
会長さんからのリクエスト。
センサアームとPSD素子を平行に近接して設置する。
この状態で登り坂に進入すると、センサアームが持ち上がりPSD素子が反応する。
ブレーキ操作は、一定時間続いたPSD素子の反応が途切れた後、一定距離進んだ地点で開始する。
—————-
空力の内容はエアブレーキ。他に憧れのランサーのウィングのマネ。
駆動モータはRE-maxではない。
大会レポート(仮)
※自分の事で一杯一杯だったため超私視線からの内容になります。
※走行タイムの1/100の位はうろ覚えです。公式のタイムを参照してください。
※デジカメを忘れたため画像はありません。
※何かあれば記憶が確かなうちに聞いて下さい。
※乱文注意
九州地区一般の部は43台がエントリーしていたが、実際に参加したのは40台以下
九州地区は第10大会ということで今年は特別に(OUTスタートとINスタートの)2回走行することができた。
全国出場枠は5人。
強豪球磨工業高校のランサーと九州産業高校系(2~3台)の参戦のため、4位通過を目標とした。
試走
試走はAコート、Bコートの両方に各自自由に分かれて行われた。試走時間は40分。
ランサーや九州産業系はBコートで、私はAコートで試走。
試走中クランクで脱輪を繰り返す。速度制御とクランク旋回時の駆動力の両方のバランスが悪い。
20分程度の間に修正&走行を繰り返しクランクを曲がることが可能となる。
クランクの修正により14.2x秒で安定走行が可能となる。
Bコートでも14秒台は1台程度という話を聞き、14秒台での完走を目標とする。
競技
Bコートを試走時と同じ状態で用いて競技は行われた。
走行1回目(INスタート):完走を目標とし最高速度を抑えて走行する。結果14.44秒で完走。
ランサー走行1回目(OUTスタート):圧倒的なスピードで14.2?秒で完走。
走行2回目(OUTスタート):ランサーの記録を目標とし、最高速度を若干上げる。14.2?秒で完走。
ランサー走行2回目(INスタート):次元が違うスピードで14.0?秒で完走。
エキシビション
島津さんロボットVS一般の部最速ランサー
素晴しい試合で共に完走。島津さんロボットのタイムは13.91秒。
——————-
Tsubameさんのロボットがなかなか良い走りをしていた。明日(今日か?)の上位入賞を祈る。
お世話になっている方々に感謝。
MCRの競技を始めて4年、ついに大会で完走&全国出場権獲得することができました。
一週間切ってこつこつ
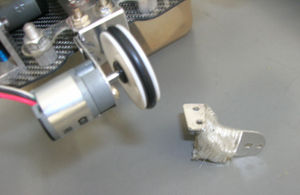
金属疲労により骨折したエンコーダの取り付け部を再製作する。
今回製作分は骨折しないように、アルミ板を張り合わせて強化した。
14.09

某県大会でエキシビションをさせて頂きました。
ご迷惑をお掛けしたマイコンカーラリー事業部及び学校関係者の方々、本当にありがとうございました。
SH7125ボード
アルファプロジェクトからSH/Tinyボードが発表される。
http://www.apnet.co.jp/product/superh/stk-7125.html
いままで待ち続けていたCPUボードの登場である。価格も3000円以下ということで落ち着いたら入手する。
マイコンカーについて
加減速があまり良くない。当初予定していたモータとピニオンの両方が入手できなかったことが悔やまれる。
毎日こつこつ
リトライ中のギアボックスの作業を進める。ギアボックスの作成は完了していないが車両に取り付け、全体像を確認する。
ホイールベース中央点での地上高は8mm、設計よりも0.5mm高い。タイヤ径が大きくなったことが影響しているようだ。今年は坂道の接触検査を余裕を持って通過できそうである。
土日にこつこつ
土日の作業内容
・サーボモータライン追従制御用関数作成
・サーボモータ角度制御用関数作成
・駆動モータドライブ回路組み立て
・駆動モータドライブ回路駆動用関数作成
・タスク管理
モータドライブ回路はまだ燃えていない。
九州地区の一般の部の参加人数が確定した。全国出場枠は参加人数の1割り+切り上げなので、あと1人出場して欲しかった。
TMCC会長さん、上位入賞おめでとうございます。
毎日こつこつ
3端子レギュレータとゲートドライバが届いたので、回路の組み立てを行う。
ステアリングモータ部分のみモータドライブ回路を組み立て、動作確認をする。
ドライブ回路の火入れは毎回緊張する。FETの蒸発を恐れながら電源ON。
今回は「まだ」燃えていない ヽ(´ー`)ノ。