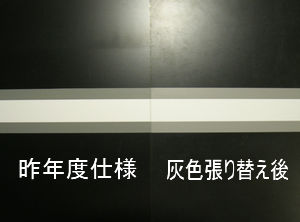
コーナ部分4枚の灰色線を貼り終わり、残りはコースチェンジ部分の作成のみになった。
新レギュレーションが発表されるまではコース作成作業は停止とする。
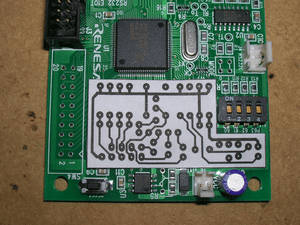
TMCCさんが公開している動画を見てブザーが欲しくなったので、圧電素子をCPUボード上に取り付ける。
ブザーは500Hzで動作させているが、マクソンの音がうるさいため圧電素子の音が映えない。
下の写真は今年度タイプのセンサ基板。ライン追従に用いるセンサの取り付け位置がポイント。詳細は後日

コーナ部分4枚の灰色線を貼り終わり、残りはコースチェンジ部分の作成のみになった。
新レギュレーションが発表されるまではコース作成作業は停止とする。
TMCCさんが公開している動画を見てブザーが欲しくなったので、圧電素子をCPUボード上に取り付ける。
ブザーは500Hzで動作させているが、マクソンの音がうるさいため圧電素子の音が映えない。
下の写真は今年度タイプのセンサ基板。ライン追従に用いるセンサの取り付け位置がポイント。詳細は後日
先週に引き続きカッティングシート貼りを行った。
昨年度のコースの手直しを含め直線部分10枚、コーナ部分5枚に灰色線を貼り終わる。
残るはコーナ部分の4枚の張替えと車線変更部分。

昨日短冊状に切ったカッティングシートをコースに貼る。
完成したコースパーツは直線部分が4枚、コーナ部分が1枚、クランク部分1セット。
コーナ部分はカッティングシートを曲げながら貼ったがハルカラーに比べシートが硬いため苦労した。

センターラインのためにカッティングシートを短冊状に切る。
以前作成したコースの灰色線も張り替えるため、60枚必要になった。
今月中にコース作成の作業を終えたいが、一部分手をつけれない場所がある。
車線変更部分の正式な発表が待ち遠しい。
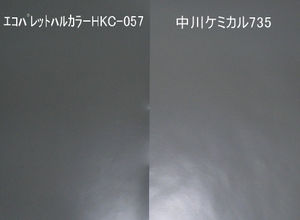
中川ケミカルのカッティングシートを購入した。写真のようにハルカラーに比べ明るい。写真を8ビットRGBで見ると各項共に20程度大きい。
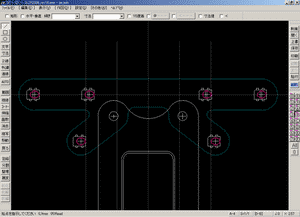
最小内径450mmのコーナをアクリル板から切り出す場合の線引き方法。
①600x450mm程度のアクリル板を入手
②アクリル板の上にカーボン紙を敷く
③カーボン紙の上に型紙を置き、型紙の線上をボールペン等でなぞる
④転写完了
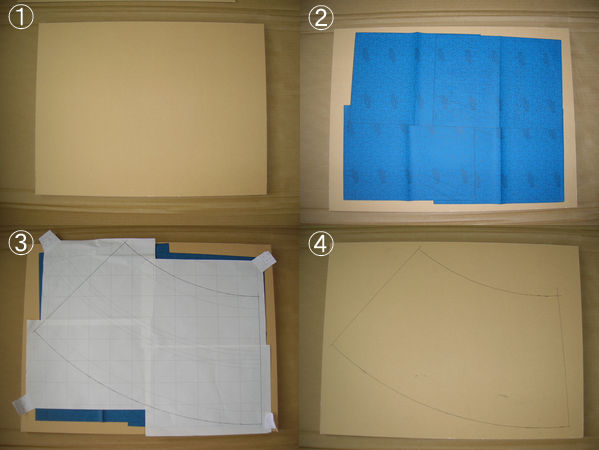
この後、線に沿ってアクリル板を切り出し、シートを貼る。
※今回使用した型紙はA4の紙にCADで書いた図面を分割して印刷しそれを張り合わせたものである。
この土日は面倒で放置していたシートの水張りを行い、黒色のシートを張り終えた。
コースを10m程度に拡張してロボットが周回できるようにする予定だが、設置する場所が見つからない。
銅線を付けずに試しにペットボトルのラベルを用いて組電池を覆う。

見た目は悪いがどうにかなるようだ。電池自体のラベルが見えるため競技規則には沿っているだろう。
バッテリーシャンテは0.3mm厚の銅板を7mm×21mmに切り使用した。
今回ラベルにはアサヒSUPER H2Oを用いたが、サントリーDAKARAの方が収縮性が良いようである。
ステアリング部に用いる歯車が到着する。
バックラッシュを詰めた時にもスムーズに回転することと、歯数が多い物でも一つの部品で構成されていることを考え、モジュール0.3を選んだ。
モジュール0.5を一年使用したが歯欠けや磨耗が少なかったことから0.3でも大丈夫だろうと考えていたが、実物を見るとクラッシュしたら歯欠けしそうである。

上図のようなセンサ基板を作成したが集合抵抗と歯車が届かないので作業停止中。
J6コネクタの使用方法が怪しくなってきたので、もしもの場合にJ8コネクタに必要な物を乗せるためのサブ基板の設計を行った。手持ちの素子(DIP規格)の関係であまり集積できないが、EPROM1個と4ビットDIPスイッチ、プッシュスイッチ1個、LED3個を乗せることができた。