・省エネ化
関西地区大会で5走後にバッテリ電圧が3.7Vを切っていた。全日本だと持たなさそう。
・赤外線センサをOFFできるようにする
・ゴール後はOFFする
・180、90度の超信地旋回中はOFFしても問題なさそう
壁との距離が悪くない時は180度回転で回るはずが、90度づつの回転が多い。なんかおかしいので要確認
・探索時のゲインを下げる
・電圧低下しても操作できるようにする。
・探索の安定化
・探索時のゲインを下げる
タイヤに埃がつくと発振しだすことへの対処
・探索の90度旋回のRを大きくする
スリップ予防
・吸引ファン
なんでこんなに吸引しないのか?
・スカート変更
いままでの物は分厚て硬すぎることが判明
・ファンの電圧
ON固定が普通とは知らなかった


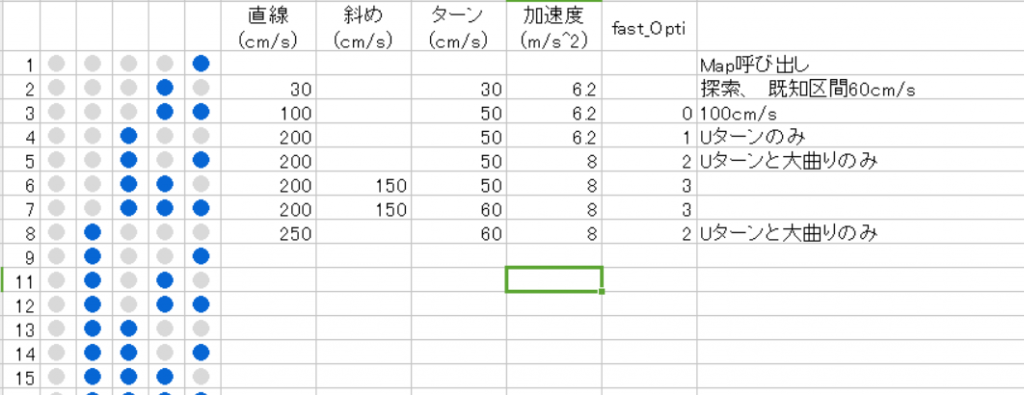


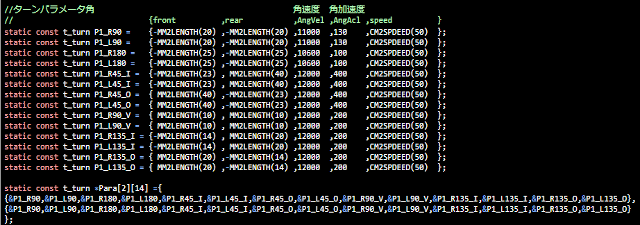 ターン毎のパラメータ格納を考える
ターン毎のパラメータ格納を考える{kind=link}