3端子レギュレータとゲートドライバが届いたので、回路の組み立てを行う。
ステアリングモータ部分のみモータドライブ回路を組み立て、動作確認をする。
ドライブ回路の火入れは毎回緊張する。FETの蒸発を恐れながら電源ON。
今回は「まだ」燃えていない ヽ(´ー`)ノ。
JMCR 2007
3連休にコツコツ
土曜にOLIMEXから基板が届いたので、3連休に作業を進めた。
金メッキ端子や強くなったレジストに満足。しかし基板は斜めの方向のカットがされずに4角形で送られてきた。ノコとヤスリで形を整える。
半田付けを始めると、色々と失敗していることに気付く。まず、3端子レギュレータの逆取り付け。取り外そうとするもスルーホールに敵わず、足を切断することに。次に、ゲートドライバの発注ミス。出力が反転するものを購入していた。
ゲートドライバとレギュレータをdigikeyに発注し、できる範囲の作業を終わらせる。
基盤プログラムも書き始めるが、ここでも問題発生。ポート1、2に取り付けている4ビットDIPスイッチと8ビットLEDの動きがおかしい。端子番号を誤って回路設計をしていたことが原因だったが、ハード側で修正できそうになかったため、ソフト側で対処する。
毎日こつこつ
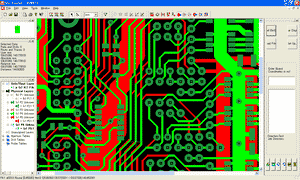
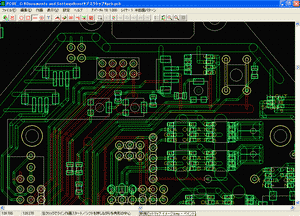
見る度に手を加えていたために収束しなかったパターン設計にけりを付けて、GC-Prevueを用いてガーバーデータの確認を行う。
たぶん、配線ミスは無い。明日OLIMEXにメールを出す。
毎日こつこつ
ロボコンマガジンNo.47を購入。なんだかんだでNo.44から連続購入中。
赤外線センサの使い方、ラインマーカーの検出方法、フェールセーフ等、junさんの記事が参考になる。
ラインマーカの検出を含めてライン追従制御の重要性をあらためて実感する。TMCCさんが公開していた大会映像でも上位陣の追従性は素晴しく見える。S字コーナでの追従失敗が多い私のロボットを思うと頭が痛い。
5.99mmと7.99mmのストレートリーマが届く。
開発費の3割は送料に消えているようだ。他の方はどうなんだろう。
毎日こつこつ

基板を除いたハードウェアの形が見えてきた。
しかし、昨年の物と比べるとタイヤのガタが酷い。
後輪は加工ミス。外形6mmのベアリング用の穴を6mmのドリルで開けたのが不味かったようだ。
前輪は設計ミス。どうしたものか。
間に合うのか?

基板や駆動モータの発注がまだ出来ていない。焦る焦る。
CPUボード上のコネクタの外し

CPUボードのボックスコネクタを取り外す場合は10個の端子を一度に温めて取り外すのではなく、ボックスのプラスチック部分を先に取り外し、端子を一本一本取り外すことで楽に作業を進められる。
プラスチック部分は、指で摘んで少しずつ左右に動かすことで抜くことができる。
クロスライン検出
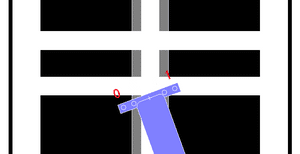
ハーフライン検出処理へ展開するために変更したクロスライン検出処理。
これまでは左右のセンサが共に反応した場合にクロスラインと判定していたが、上図の場合には検出できない可能性がある。
この問題を解決するために導入したルールは、
片方のセンサが反応してから一定時間内にもう一方のセンサが反応したらクロスライン
というものである。ここでの一定時間はセンサ部分の振動周期やクロスラインを通過する時間を考慮して決定した。
このルールを適用したロボットは今のところ、誤検出もなく安定してクロスラインを検出できている。
ハーフラインの検出方法が考え付きません。
毎日こつこつ
今までは物を注文する際に送料を少なくするために、できる限り商品金額が多くなってから注文するようにしていたが、これもやり過ぎは良くないようで、現物がない状態ではモチベーションが上がりにくい。
ということで少しばかり商品を発注。若干の送料増加は気にしないでおこう。
毎日こつこつ
目が疲れたので今日はココまで。正直メイン基板に飽きてきた。他の基板を考えたい。