両面基板用にパターンを引き直す。片面で設計の時には入らなかった素子も実装できそうである。
後は電源周りを書き上げれば一応設計完了となるので、この基板だけでも今月中に終わらせる。
JMCR 2007
コース作成6

久々の作業&更新。
黒色のカッティングシートを貼った後に放置してきたレースチェンジ部分のコースを仕上げる。
6月に入ってから体調が良くない日が多い。最も重要なインフラは体である。
コースアウト時の処理
ロボットがコースアウトした後、壁や物に衝突してしまうとギヤの破損やFETの炎上といった被害をこうむる恐れがある。被害を最小限にするために、コースアウト直後にロボットの動きを止め衝突を回避することが必要となる。
動きを止める動作は速度や加速度を無くす処理を行えば良い。
コースアウトを判定する方法は多くあるだろうが、単純な処理で誤作動のない物が求められる。
私が使用しているコースアウト判定方法は以下の3つ。
1.通常走行時(クランクやコースチェンジでない)で一定時間加速しても速度が遅い。
2.全ての走行時において一定時間以上ステアリングを片方に切り続けている。
3.全ての走行時において一定時間以上ラインセンサの値が変化しない。
コースアウトしたら終わりだからそんな処理は要らない(そんなふうに考えていた時期がありました)。というような考え方もあるだろうがサイフや時間を考えると必要である。
5月は目に見える形では作業がほとんど進まなかった。6月中には回路を終わらせたい。
配線2
乗せたい回路はまだあるが、乗せる場所が無くなってしまった。両面基盤にするか悩むところ。
コース展開

場所を借りて全長15mのコースはどれ程の大きさになるのかを見ると、想像以上に場所を取ることが分かった。
大会近くになるまでは全てのコースを展開することは諦める。
配線
なかなか進まず。
電流検出メモ
Analog Devices の AD8206 か AD8210 に10mΩの低抵抗を組み合わせて電流検出を行う。
2.5Vは5VラインからLDOで取り出す。
速度制御周期が10msなので電流制御周期は0.1ms。
ITUの数を節約するためにPWM周期は0.05ms。
センサ出力の変動
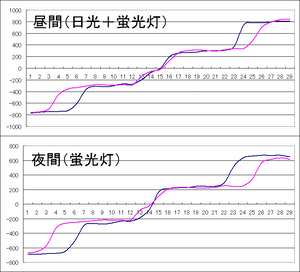
上図はコースのセンターライン付近(±15mm)でのセンサ出力変化を昼間と夜間の2回測定した物である。
昼間のセンサ出力値が約±800であるのに対して夜間のセンサ出力値は±700程度となることから、日光の影響をセンサが受けていると考えられる。
センサ出力の変化による追従性の変動を抑えるために、走行前にゲインを変化させる必要がある。
波形が汚いし、傾斜(リニアとはとても言えない)区間も少ない。
追従制御のボトルネックはコレだろう。良い改善策はないのだろうか。
コース作成5+α
コーナ部分4枚の灰色線を貼り終わり、残りはコースチェンジ部分の作成のみになった。
新レギュレーションが発表されるまではコース作成作業は停止とする。
TMCCさんが公開している動画を見てブザーが欲しくなったので、圧電素子をCPUボード上に取り付ける。
ブザーは500Hzで動作させているが、マクソンの音がうるさいため圧電素子の音が映えない。
下の写真は今年度タイプのセンサ基板。ライン追従に用いるセンサの取り付け位置がポイント。詳細は後日

コース作成4
先週に引き続きカッティングシート貼りを行った。
昨年度のコースの手直しを含め直線部分10枚、コーナ部分5枚に灰色線を貼り終わる。
残るはコーナ部分の4枚の張替えと車線変更部分。