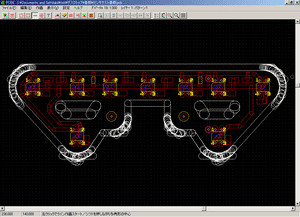
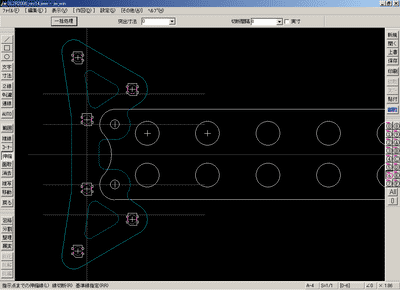
今年度のラインセンサの作成のための試作品のパターンを書く。
PCBEでR付きの基板もどうにかなるようだ。各フォトインタラプタはセンサの配置方法の③と⑤が試せるよう配置した。
JMCR 2007
今後の予定
今年度のロボットの機械設計を一旦止め、昨年度のロボットを利用して発砲エンビ材を用いたセンサーバーや配置を変更したセンサの検討を行う。
また、電気系の設計も開始する。雑っと考えた結果以下のようなポートの使用方法になる。ポート3,4,9についてはCPUボード上にサブ基板を設けることで実装することになるだろう。
ポートA
入力:ロータリーエンコーダ
入力:ゲートセンサ
入力:坂道センサ
出力:モータ回転切り替え1
出力:モータ回転切り替え2
出力:モータ回転切り替え3
出力:ゲートセンサ電源
出力:LED(ブレーキランプ)
ポートB
出力:P-PWM1
出力:N-PWM1
出力:P-PWM2
出力:N-PWM2
出力:P-PWM3
出力:N-PWM3
出力:FREE-BREAK切り替え1
出力:FREE-BREAK切り替え2
ポート7
入力:ポテンショメータ(アナログ入力)
入力:右追従(アナログ入力)
入力:左追従(アナログ入力)
入力:右姿勢(アナログ入力)
入力:左姿勢(アナログ入力)
入力:(ジャイロ OR 引き込みセンサ)(アナログ入力)(予備)
入力:右クランク
入力:左クランク
ポート3
出力:7ビット LED
ポート4
入力:8ビット ディップスイッチ
ポート9
入力:プッシュスイッチ
入力:プッシュスイッチ
入力:プッシュスイッチ(予備)
あぁ両面基板が使いたい。
re:ロボットの加速性能
昨年度のロボットの加速性能を再び計測しました。
今回は積分値の誤差も8mmに抑えられているので正確な値のはずです。
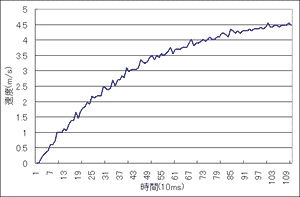
4m/sに達するまでに0.8秒程度掛かっています。
新品のモータを使用すればもう少し良い値が出るかもしれません。
昨年度の車の重量は約700g、ギヤ比は60:8、タイヤ径は35mmでした。
部品発注開始
ロボット製作に必要な部品の発注を始める。
部品入手は設計がほぼ固まったということで始めているので、これ以降大幅な機構の変更は認めない。
色々と手を付けたい物もあったが今年のロボットでは見送る。見送った内容はAWD化、自作サーボギヤ等で、これらについては次の機会に実現をしたい。
ロードマップ
今年の作業予定を描く。
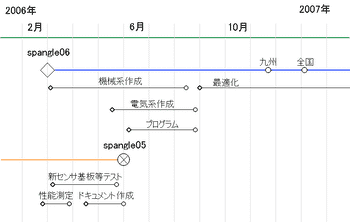
設計・製図や部品の選択・入手等があるが、横須賀大会の頃には一応完成を目指す。
私が間違っておりました。ノイズ対策
先のエントリのコメントでetsuさんが仰っていたようにモータにコンデンサを取り付けたところノイズが大幅に減少しました。
今まで電源に乗るノイズが問題だからFET出力部にコンデンサ付けとけば良いと思ったていましたが間違っていました。モータからは電磁波もたくさん放出されるようです。
モータ缶にもコンデンサ取り付けるようにします。
あああぁぁ何やってんだ
ロータリーエンコーダからの入力ノイズを調べるために速度を積分してみたところ、
実際の直線部分の長さよりも長い値が出てきました。
ああああああ。
つまり、今まで使っていた情報はデタラメ。フィードバックも無茶苦茶。参加者レポートの速度部分も間違い。
ああああああ。
急いで差し替え願いを出すが(今見たらメールの文面もメチャクチャ)、どうなる事か。
ああああああ。
間違ったデータ掲載してもらってゴメンナサイ。迷惑かけてゴメンンサイ。
本当に何やってるんだ俺。あ”ー
センサ部分の改良
レポートのアレは舵角と姿勢センサの差だけではどういう状態かいまいち分らない事と、センサ先端部の重量が増すことにより制御性が悪くなる事がありますが、まずは後者について対策を打って行きます。
先端部を軽くするために、
1、発光と受光素子が1セットなったセンサを用いる。
2、センサ以外の回路は全て本体側に搭載する。
3、基板はできるだけ小さく、不必要な所には穴を空ける。
↓こんな感じにしたいですね。
といってもPCBEでこの形を作るのは大変ですけれども。
センサの配置方法
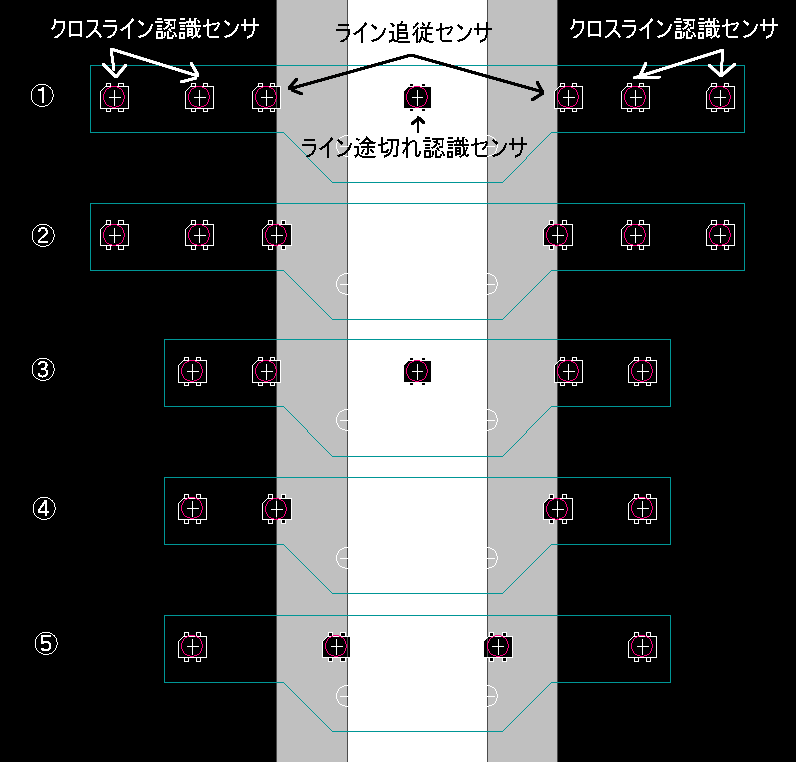
ここでは①の外側4つのセンサ(クロスライン認識に用いる)をクロスライン認識センサ黒色と灰色の境目付近にあるセンサ(ライン対重要に用いる)をライン追従センサ白線上にあるセンサ(ラインの途切れ認識に用いる)をライン途切れ認識センサと呼びます。
センサ上の赤丸は、そのセンサが認識できる範囲を示し、赤丸の外側での出来事をセンサは認識できません。
①のセンサの配置は全てのセンサの仕事を分けることでライン追従、クロスライン検出、ライン途切れ検出を確実に行うことができます。
②のセンサ配置は①のライン途切れ認識センサの役割もライン追従センサが担っています。二つのライン追従センサで黒色が認識されるとラインの途切れと判定します。しかし、この配置ではライン認識センサのラインのとのズレ量の把握できる範囲は①のソレと比べて1/2になります。
③のセンサ配置は①のクロスライン認識センサの内の内側2個の役割をライン追従センサが担っています。ライン追従センサで白色が認識されるとクロスラインと判定します。
④のセンサ配置は①のライン途切れ認識センサの役割とクロスライン認識センサをライン追従センサが担っています。二つのライン追従センサで黒色が認識されるとラインの途切れと判定し、ライン追従センサで白色が認識されるとクロスラインと判定します。しかし②と同様にズレ量の把握できる範囲が狭くなっています。
⑤のセンサ配置は③と同じように①のライン途切れ認識センサの役割とクロスライン認識センサをライン追従センサが担っています。二つのライン追従センサで黒色が認識されるとラインの途切れと判定し、ライン追従センサで白色が認識されるとクロスラインと判定します。③とは違いズレ量の把握できる範囲は①のソレと同じです。
※コメントのエラー修正しました。
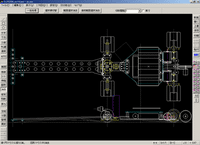
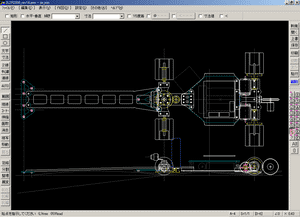
製図技法
CADで製図を始めソフトの使い方も憶えてきたが、よく考えてみると表現方法やら技法といったものを全く習得していない。使い方は憶えたが、活かし方がわかっていないのである。HTMLでも文法がおかしいとブラウザによって表示が全く違ってしまうように製図でも技法が違えば見る人によって何を示しているかわからなくなるのではないか。
そんなことを考えながらWeb上の製図技法を検索していたら新たな発見。
いままで歯車の基準円は歯の先端と根元の中心を通っているものだと思っていたが、実際には歯の先端からモジュール分の長さ、歯の根元からモジュール分×1.25の所を通っているらしい。
基準円が接触するように2枚の歯車を配置すると適切なバックラッシュが取れるのであろうが、ステアリング部分ではコレを詰めなければならない。ステアリング部分では基準円よりも詰めて配置しよう。
といっても1/100mmなんて精度は出せないので、2枚の歯の間隔が若干詰まる位置に穴あけし、その後横穴にしながらバックラッシュをあわせることになる。