
JMCR2008全国までの走り方
スピンアウトするようになったので使用を止めた
アンダーステアが強い車両で、車線変更からの立ち上がりに全力で加速すると、より前輪が滑ることになる。図左側
この立ち上がり時の強アンダーステアに対して、前輪が滑り出す前に操舵をこじることで、ある程度の抑制ができた。図右側
1.復帰先のラインを発見したら、操舵を反時計方向に切る(角度の制限はなし)
2.センサバーの左端以外の反応が無くなったら、トレースを再開する
JMCR2008全国までの走り方
スピンアウトするようになったので使用を止めた
アンダーステアが強い車両で、車線変更からの立ち上がりに全力で加速すると、より前輪が滑ることになる。図左側
この立ち上がり時の強アンダーステアに対して、前輪が滑り出す前に操舵をこじることで、ある程度の抑制ができた。図右側
1.復帰先のラインを発見したら、操舵を反時計方向に切る(角度の制限はなし)
2.センサバーの左端以外の反応が無くなったら、トレースを再開する
覇者の条件
JMCR2003の一般の部の優勝ロボットは青嵐である。
私がこの競技に参加したのは、その走行映像を見たからであり
その鋭く、何処までも加速する直線走行や、減速を感じさせない旋回走行。
今でもその劇的なパフォーマンスを覚えている。
性急でなくて誰が感動する
人は感動によって動くのです
一般の部の覇者にはそういった物が必要だと思う。
「ハズレを引かない」だけでは相応しくない。
///////////////////////////
ロボコンマガジンNo.62購入。
色々と思うことはあるけれど、七年越しでやっと掲載された。
おかげさまで、一般の部で優勝することができました。
詳細&レポートは後ほど書きます
/////////////////////////////////////////
・サーバ&ドメインの更新手続きの案内が届く
・控え室、隣は十万石クラブさん
・開会式、「選手以外の人も前にきて、一緒に盛り上げましょう~」というアナウンスが印象に残った
・予選コースレイアウト公開され眺める。長い直線の後には、R600コーナやクランク前1mにクロスラインがあり、後輪駆動でも走れそうなレイアウト
・走行順番は苗字の五十音順、九州大会のような名前でソートではなかった
・アドバンスA,B組の予選をビデオカメラのモニター越しに観戦
・招集時間直前に、下り坂センサを不注意により壊す
・招集の行列の中で瞬間接着材と紙テープで修理するが、検出精度悪し
・予選開始、常連&強豪のコースアウトは全国ならでは
・Bコースのアナウンス
・Taroさん速い
・strvさんのロボットがスタート検知できなかったとの事
・走行順になる
・スタート検知用のKU381-80の反応がおかしい
・手動スタートを覚悟して、SWに直に手を伸ばせる体勢でスタートを待つ
・一瞬送れたようにも見えたが、自動スタート成功
・完走後のタイヤを確認。後に控えている人に見せる。
・上位の2人のタイムは16秒台
・予選上位8人中6人が九州
・決勝コースレイアウト公開:変更上り坂後のクランクがある
・十万石クラブさんの話で、連続車線変更に気付く
・車線変更後に次のハーフライン、クロスラインを探すまでのタイミングを早める
・地区大会から、このタイプの組み合わせに対応できるようにパラメータをあわせていた
・車検場での待ち時間、アドバンスのトーナメントに異常に時間が掛かっている(後に再レースのためだと判明)。腰が痛くなってきた。
・トーナメント開始:連続車線変更で多くのロボットがコースアウト
・決勝トーナメント1戦目:予選と同じパラメータを設定。上り坂後にジャンプしクランクで不安定になる。
・決勝トーナメント2戦目:相手はTMCCコーチ、直線速度を下げ旋回走行系の設定を上げる
・ベスト8中5人が九州そして、アナログセンサ系4台、デジタルセンサ4台
・車検場で、junさんに色々質問
・車検場でのレギュレーション厳しくなりました?
・決勝トーナメント3戦目:ここだけ九州大会。現状のタイムでは負けるので設定を上げる
・決勝トーナメント準決勝:ここでも九州大会。如何足掻こうと勝負にならないので設定そのまま。同タイムがでるが、ランサーがコースアウトしたとのこと。コチラもいよいよ後輪タイヤが無くなる
・決勝トーナメント決勝戦:ここでも…。後輪を考え、同設定で走行
・エキシビション:坂の頂上で止まらず坂後のクランクでコースアウト
直接、間接、参加多くの形でありますが、共に素晴しい大会運営してくださった皆様、また、当方の開発に協力していただいた皆様に多謝
事例紹介
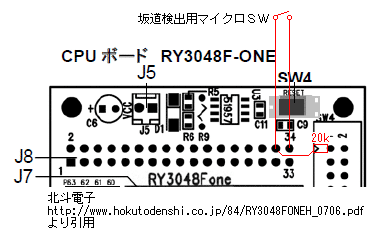
坂道検出用のマイクロSWへの電源供給としてJ6コネクタの1番ピンから20kΩの抵抗を通して5V、J8コネクタ34番ピンをGNDとして用いたところ。走行中かつマイクロSWが切り替わる場合にマイコンがリセット動作するようになった。
走行していない場合や、常にSWがONの状態、OFFの状態ではリセットしない。
走行中5Vラインがリセット動作の範囲付近で暴れている状態で、さらにマイクロSWの切替による負荷の変動が追加され閾値を越えた為と考えられる。
GNDラインは変動していないと仮定して、5Vの生成箇所直近から5Vを直接マイクロSWに供給し、そしてSWから39kΩの抵抗を通してGNDと入力端子に接続したところリセットすることが無くなった。
//////////////////////////
ついでに、
リセットIC付近の電圧変動を抑えるため、
・c11にパラでコンデンサ追加
・J6コネクタ1番ピンとGND間にコンデンサを追加
ここ数年で最悪の走行性能から抜け出し、最終調整を終えた。
次の走行は全国大会予選となが、今年は(も?)完走を目指すことになりそうだ。
/////////////////
・タイヤの重要性を再認識(最重要項目)
・十分な調節を行えるようにロボットは速めに完成させるべきだ。今年のバッテリ充電回数&シリコンシートの張替え回数は5回程度だが、それ以上に考える時間が足りなかった。

次モデルのホイルの検討を続ける
ギヤードモータハブシャフトとF1の後輪タイヤの組み合わせを試し失敗
・ハブのサイズが異なる
・ハブシャフトの穴系がФ6
/////////////////////////
私の使い方が悪いのか、05年モデルから度々暴走してきた相補PWM
タイプS基板の普及により、似たような問題が表に出てきたようだ。
相補PWMの出力が反転する場合の対処法
エレガントな解決法求む
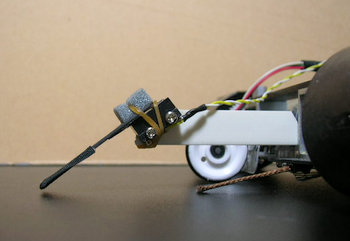
中国地区で投入予定だった上り坂道センサ
マイクロSWを逆さにして使うことで、接点切替り後のストロークの余裕を増やす。(コレの三つ目が不要になる)
【関連】
・登り坂検出用リミットスイッチの導入時に気を付ける3つの点
・下り坂センサ
・坂道検出
・メカ部基本構成完了、この先は足回りが決まらないと詰めれない
・プロクソンのテーブルドリルとミニクロステーブル購入
////////////////////////////
081205分
AWD化の目処がついた。設計を始めよう。
ただ、今年のモデルは昨年の8月末から図面を引き、12月末に基本設計完了。そこから完成までに10ヶ月掛かっている。
その大半は時間とモチベーションによる作業の遅れによるものだったが、次のモデルの完成は何時になる物やら。
・製作中の上り坂センサの加工を失敗し、下り坂センサのみの仕様で行くことに
・博多駅から新幹線で岡山に
・カメラを持った人がやけに多いと思っていたら、レトロな0系新幹線が到着
・0系新幹線は今日で引退だそうで、先のカメラは多くのファンの方々のようだった
・各駅停車とのことで、小倉で乗り換えする
・BD-1で輪行している人がいた
・会場に付くと、レギュラーな人たちがそろっている。ついでにネットブックも略全種勢ぞろいの状態
・アドバンスの部で良いタイムがでていた
・試走開始、九州大会以降の変更による影響を見る。問題なし
・設定を弄ろうとタイムの変化は獄僅か、コレは問題
・走行1回目、上限の設定で走行し穏やかに完走。 せりかれん が速い。
・走行2回目、もう少しタイムを上げたい為もあり、限界テスト。坂の頂上での減速が間に合わず、コース上で少し立ち往生する。
・結果は2位
運営や参加の方々、お疲れ様です&ありがとうございました
/////////////////////////////////
中国で確認できたこと
・7°坂+坂後余裕30cm+R600に対応できる直線限界速度(4.7m/s)
これ以上だと、減速が間に合わない
・車線変更の処理、パラメータ
