
MCR in 神奈川 2012で発表した資料を公開
PDFダウンロード
MCR
MCR in 神奈川
前日の試走日には、だいぶ遅刻。
コースには懐かしのダブルレーンチェンジが設定
他にも、
・下り坂直後のクランク
・クランクから次のクランクまでの区間が短い
・クランク脱出後直ぐにコーナ
といったロボットの強靭性を試すテンションの上がるレイアウト。
夕方からは技術交流会。ジャンキーな方々がネタを披露。
私も話をさせて頂く。(スライドは後で公開)
帰りの豪雨には本当に参った。
大会本番
コースが拡張され、さらに面白くなっている。
高難易度のため、1回目の走行ではBasicの完走は2台。
Advanceではゴール寸前で停止しながらもYukiさんが好タイムで完走。お見事。
一般部門。昨日の発表メンバーで完走者はKuroさんのみ。
2回目の走行でも完走率はあまりあがらず、当の本人も完走できず。
急遽、設定されたフリー走行時間のおかげで、3回目にやっと完走。
その後は、定刻までタイムアタックの流れになったので、
減速中に操舵が暴れる不具合の対策を行う。
競技結果は一般2位。しかし、junさんの本気走りに1秒離される。
十二分な試走時間と、それでもまだ攻略できない難コース。
楽しい時間をありがとうございました。
運営頂いた神奈川実行委員会の皆様に感謝します。
エキジビション走行
県大会では学生とのエキジビション対決を、
地区大会ではエキシビショントーナメントの機会を頂く。
今年は共に無事完走。一般の部やカメラ誘導の紹介にもなっただろうか。
タイムは学生記録には0.5秒、神には1秒届かず。
運営や参加者のみなさんお疲れ様でした&ありがとうございました。
マーカーの見つけ方

クロスライン、ハーフライン等の見つけ方を考える。
初期は、図の3箇所の赤囲み範囲をY軸方向に差分して、
その差が閾値以上ならばマーカーがあると判断していた。
ただし、通常のトレース中には、中心のエリアの画素は同一の値になるため、ラインの有無を判断できなかった。
電通大杯以降は、LED照明により外乱をある程度抑制できることから、
あらかじめ固定の閾値を決めておいて、それと画素の値を比較して白色と黒色を判断していた。
RMCR後から5cm先を見るために、カメラ&LEDの角度を変更したため、
LED照明からの拡散反射光が不足して周辺光の影響を受けやすくなった。
比較的明るい場所で、かつ、坂の頂上や下り始めといった、さらにLED-路面の角度が浅くなる場所で誤検出がおきる。
熊本では坂の折り始めで車線変更モードに入ってしまい、派手にクラッシュした。
ということで、白黒判定用の閾値を動的に変えるようにしてみる。
具体的には図の2ライン上の全ての画素から最も暗い値を見つけて、
それを元に閾値を算出し、各画素の値が閾値よりも明るければ白とする。
基準算出用に使う2ラインは、条件として
1.LED照明にてムラなく照らせる範囲
周囲の暗い場所でLED照明の光にムラがあると、基準値が正しく決めれない。
周囲が明るい場所では、コース上の奥行き2cm、幅30cm程度の範囲では光は均一だと期待する
2.コース上での奥行き2cm以上の範囲
クロスラインやハーフラインの幅2cm以下の範囲で閾値を算出すると、
クロスラインに差し掛かった時に全ての画素が均一な値になり、閾値が決められない。
LED照明は
路面を同じ明るさで照らすためではなく、
最低限の明るさを保つためのもの
と考えたほうが良さそう
//////////////////////////////////////////////
MCR神奈川から申し込み書が来ない、メール届いてますか?

熊本へ
マイコンクラブにお邪魔させていただく。
部員も多く、とても活発な部活だった
調子が悪くなってもその場で自分でサクサクと直していく。
シンプルなメカだけでなく、意欲の高さのおかげだろう。
大会が近いとはいえ、活動時間の長さには驚いた。
前回、ソフトでの限界を感じた画処理ロボットは
ロール軸方向の加重移動を抑える目的で前輪のトレッドを25mm程広げてみた。
結果としてはアンダーステアは目に見えて減少。逆に各所でオーバーステアに気を使うことになってきた。
日ごろとは違う環境になると、今まで見えなかった問題が頻発する。
車線変更&クランクの複合はだいぶ修正が必要で、
これまで走っていた適当な処理では無数のコースアウトを積み重ねた。
コース両端の白線の読み間違いが多く、それを修正するにもセンサデータが不足している
カメラCPUからもう少しデータが欲しい。
グリップが足りない
これ以上早くするのは厳しいような気がする
この画処理ロボットは
酷いアンダーステアの補正と
内輪の荷重が殆ど抜けるため
旋回中は外輪だけを駆動して内輪は転がしているだけ。
そこまでやってもアンダーは出ているし、
負担が掛かっている後輪も滑り出している。
後輪のグリップアップのためにリアトーイン1度と2度を試すも、
タイヤを引きずる音が大きくなるだけでグリップ向上にはつながらず。
今回のグリップ不足はスリップ角では解決できないようだ。

全体最適化
RWD構成のボトルネックはブレーキングで、兎に角止まらない。
クロスラインを検出後の急減速では、その減速による荷重移動で後輪の摩擦円が小さくなる。
密着型センサのロボットでは低重心のお陰で、モーターパワーが摩擦円を超えることは稀だったのだが、
画像処理ロボットでは前輪よりも前の高い所に重量物が配置されているため、
減速時の荷重移動が大きく簡単に後輪のグリップが破綻してしまう。
で、タイヤが滑ったまま減速が出来ないことが頻発するし、片輪のグリップが先に破綻した場合スピンする。
タイヤの滑りを検知したらブレーキを弱めてグリップを回復してやればスピンは抑制できるけど、
制動距離が長くなってしまう(50cmで止まれなきゃ意味が無い)。
あと、コーナへの進入時に、弱い減速しか出来ないと、速度が高いままコーナの奥まで入ってしまう。
すると横方向に必要なグリップが急激に増えて後輪が破綻してスピンする。
対策としては、重心を上げている原因のカメラユニットの軽量化が一番だが、
SSMレバー比や外乱への強度や機械的強度といった制約が多いので、
後輪に付近に重り(約17g)を積んで、制動時の荷重移動の影響を小さくしてみた。
結果はとしては、
・クランク区間での減速が間に合うようになり直線での速度を向上できた。
・コーナ進入時のブレーキも強くできて、スピンし難くなった。
その他RMCRには時間が足りなくて盛り込めなかった制御を追加したところ、
やっと一つ壁を超えた。
夏休みの成果

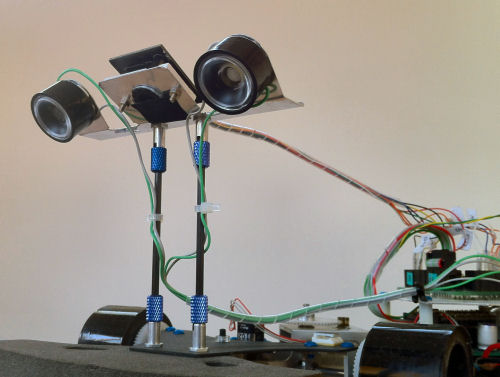
強度UPを狙う新しいカメラユニットの支柱ができた。4g位重くなってしまった。
操舵の影響でカメラが揺れるのを防ぐためには、思ってた以上に捩れ剛性が必要なようだ。
走行速度が向上すると共に
初期の構成だとカメラが揺れるのが目で見て分かるようになってきた。
その後、支持棒の間隔を22mmから42mmに広げることで目視では振動は無くなったが、
ログを見ると偶にコーナ旋回中にライントレースが振動的になることがあった。
BOSSの助言で支持棒をダンボールで補強してやるとログ上でも振動が収まり、コーナ旋回中の暴れも減ったため、その仕様でRMCRには参加した。
しかし、構造的に弱いようなので今回の作成にいたる。
結果、手で触っても剛性があがったようなので暫くは安心してよいかな
{kind=link}
{kind=link}