2010年度ルネサスマイコンカーラリー競技大会の要項が発表された。
確認した変更点は2箇所
・主に使用するマイコンの制限緩和
・白黒反転区間または中心線無し区間の追加
MCR
第3回電通大杯 マイコンカーラリー大会
大阪電気通信大学自由工房で行われた第3回電通大杯 マイコンカーラリー大会に参加した。
大会は7部門(一般A、B、高校生A、B、ベーシック、画像処理)に分けられ、2回走行での記録を競うもので、競技は以下のような結果になった。
試走1:コースアウト、リセット+ライントレース失敗
試走2:コースアウト、ハーフライン検知後にライントレース失敗
本番1:試走と同設定
本番2:10秒78
試走でのコースアウトは今回の為に導入した処理が原因と分かり、本番ではロムを書き換えて走行することになった。
問題の処理はハーフライン検出後に車体をオフセットして走行するというものだったが、予想よりも外乱が強力だったため失敗した。再度練り直しが必要。
自分が参加した部門以外では、
4WS仕様のロボットの華麗なクランク走行(車線変更も見たかった)や、
トラック外装で荷台の荷物まで作りこんであり、さらにサイドミラーがSWという懲りに凝ったロボットが印象的だった。
また、画像処理の部のロボットが走るところを初めて見た。
以外に走るし、以外に落ちる。ロボットも様々な仕様で見ていて面白い。
速度も完走率もまだ低いけれど、この過渡期な面白さにとても魅力を感じた。
運営をしてくださった大阪電気通信大学様、MCR近畿事務局様に感謝します。
久々の更新
verilogの学習や新規採用予定の部品の検討をしていた。
>マイコンカーラリー穴吹オープン2009
ロボコンマガジンのサイト経由で申し込み締切後に知る。次は参加したい。
>アナログオシロスコープ CS-4125A購入
スペックは寂しいけれど、やっと波形を観測できるようになった。
>ここ一年程の検討内容(主にソフトの部分)
RMCR2009:rev.7
・坂道センサ
・ハーフライン二本読み(距離ベース)
・坂道処理(頂上)
福岡大会デモ:rev.8
・ハーフライン二本読み廃止
九州大会デモ:rev.9
・坂道処理(麓)
NEXT
・車線変更処理?
・ハーフライン検出処理?
・コーナ侵入検出処理?
夕食はチキン南蛮
九州大会のエキジビションに声を掛けて頂いた。
癖の無いレイアウトのため上限設定で走行するも、去年のランサーのタイムには届かず、Advanced Classとの差も僅か。
「走り方が早そうに見えない」とのアナウンスがあったが、確かにその通り。この走り方では限界があるように思える。
良い機会なので坂道処理の変更について動作を確認し、ラインセンサが外光に対して以外に強靭なことも確認できた。
・会場となった佐土原高等学校はTsubameさんのホーム。『人ありて技術』
・トーナメントでのアナウンス
・アルゴリズムなりノウハウなり話す機会を頂ければ手弁当で参ります。
youtubeに挙げられた動画で不思議なトレースに気づく。以前横須賀で見たMM07と同じようなトレースシステムだろうか?
こつこつ

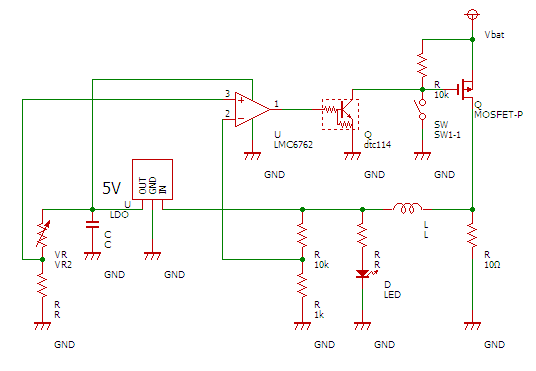
放電器を作る。これで、バッテリに抵抗を繋げて一定時間毎に電圧確認する作業から開放される
回路は、バッテリに繋いだ抵抗の両端にかかる電圧と基準電圧を比較し、一定電圧を下回ったら回路を開放しつづけるものとした。
・抵抗で10W消費すると可也の熱量になる
・基準電圧をレギュレータで作ったが、もっとシンプルに出来たはず(ダイオードの順方向電圧とか)
・バッテリ電圧の分圧抵抗を10kΩ→5kΩ
{kind=link}
///////////////////////////
ROBOCON Magazine 2009年11月号
一般の地区大会の再開も検討されているとのこと、これは嬉しい。
前大会の時よりも扱いが良くなった。これも嬉しい。
///////////////////////////
福岡県大会
マイコンカーラリー2010福岡県大会_A-Class_決勝トーナメント@YouTube – RenesasMCR1 さんのチャンネル
Advanced,Basic共に内容は小倉工業が持って行った。
車線変更からの立ち上がり方(旧)

JMCR2008全国までの走り方
スピンアウトするようになったので使用を止めた
アンダーステアが強い車両で、車線変更からの立ち上がりに全力で加速すると、より前輪が滑ることになる。図左側
この立ち上がり時の強アンダーステアに対して、前輪が滑り出す前に操舵をこじることで、ある程度の抑制ができた。図右側
1.復帰先のラインを発見したら、操舵を反時計方向に切る(角度の制限はなし)
2.センサバーの左端以外の反応が無くなったら、トレースを再開する
バッテリの破棄

今までの競技で使用してきた二次電池が溜まってきたので、
劣化して使わなくなった物を捨てる
破棄方法は小形充電式電池のリサイクル:社団法人電池工業会に従う。
今までの大会で使用してきた二次電池。
最近ニカドを多様しているのは、その軽さの為
JMCR2005 パナソニックHHR-3HPS
JMCR2006 パナソニックHHR-3SPS
JMCR2007 パナソニックHHR-3SPS
JMCR2008 サンヨーKR-1100AAU
JMCR2009 サンヨーKR-1100AAU
RMCR2009 サンヨーKR-1100AAU
////////////////////////
・Farnell-Newark検索プラグインを更新
・アクセスが落ち着くまでクローラーを弾きます。ご了承ください
MCR関連プロジェクト複製ツールVer.1.10
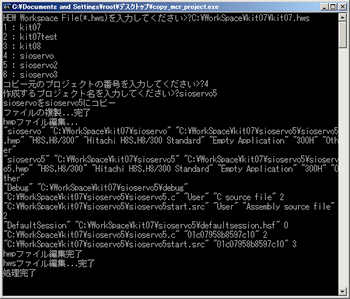
○コレは何か
HEWのプロジェクトを複製するソフトウェアです。
○具体的に何ができるのか
マイコンカーラリー公式ページで公開されているルネサス統合開発環境H8/3048関連プログラムと同じ構成のプロジェクトファイルを複製します
○使い方
使い方
○更新内容
・.hwpファイルと同階層に”types_beep.h”と”types_beep.c”がある場合に対応(モータドライブ基板TypeSのワークスペースに対応)
・hwsファイルのデータベースバージョン7.0に対応(公式で公開されているものと同バージョン,古いHEWのファイルにも対応)
○動作確認したHEWのバージョン
Version 4.00.03.001(講習会CD等で配布されたもの)
Version 4.02.00.022(作者環境)
○複製に失敗するワークスペースもあります
・hwpファイルと同階層にtypes_beep.c以外に2つ以上の.cファイルがあると失敗します
・hwsファイル、hwpファイルのデータベースバージョンによっては失敗します(作者の環境 hws:Ver9.0,hwp:Ver2.8)
2010/08/29記
・R8Cのワーススペースには対応できていません
○ダウンロード
動作報告、不動作報告お待ちしています。
RMCR2009
おかげさまで、一般の部で優勝することができました。
・前日入り、鏡に張り付いてコースを眺め続ける
・まさかの連続車線変更のレイアウト
・今までの大会を盛り上げてきた方々が、参加していなかったり、会場に現れなかったり、不慮の故障で参戦できなかったり。
・試走:当初の予定のパラメータで走行、路面コンディションは抜群
・有名所の人たちとトーナメントで当たりたくない
・メカメカしいロボットの見事な走行に歓声
・先に走った岐阜チームの方々が好タイムを出す
・予選1:予定最高設定で走行、暫定1位
・2走目開始
・一走目とほぼ同タイム、作戦か?
・予選2:予定外の設定で走行。逃げ切る
・予選1位は落ちるジンクス
・決勝1:まさか落ちるとは
・クロスラインを読み損ねる:原因不明なため対処不可
・クランクの立ち上がり失敗:対処不可
・OPEN決勝、安定かつ高速な走りでenoさん優勝、おめでとう
・決勝2:まさかココで当たるとは
・決勝3:また落ちた
・坂の下り終わりでセンサが跳ねる→トレース失敗
・坂の下り終わりで後輪が跳ねる→90度ターンで追従限界超:対処不可
・1大会で2回脱輪は何年ぶりか
・決勝4:潔く上限で行くとのこと、ならばコチラも
・決勝5:タイムが頭打ちの当方に、タイムアップを重ねるF先生。
・なるようになれ
・あまりの速度差に駄目だろうと思っていたら、僅差でゴール
・INコース、OUTコースの誤差以下か?
・エキシ:オープンの部の覇者enoさん
・滝田教授進行によるビデオ解析解説
・また決勝トーナメントのログを保存し損ねる
・あの動画欲しい
・コースレイアウトと運にかなり救われた大会でした。
今年も大会を開催してくださった運営の皆様、
会場でお声をかけて頂いた皆様や参加者の皆様
そして、当方の開発に協力していただいた皆様に多謝
告知
8/25(火)に県立福岡工業高等学校で行われるマイコンカー講習会の中でプレゼンの機会を頂きました。
午後からの1時間、以下について話そうと考えています。それ以外のリクエストがあれば、コメント欄やメールフォームでどうぞ。
・速度制御と減速ポイント
(速度制御法の紹介と、坂、クランク、車線変更での減速について)
・3m/s以上で進入するクランクの走り方