J6コネクタの使用方法が怪しくなってきたので、もしもの場合にJ8コネクタに必要な物を乗せるためのサブ基板の設計を行った。手持ちの素子(DIP規格)の関係であまり集積できないが、EPROM1個と4ビットDIPスイッチ、プッシュスイッチ1個、LED3個を乗せることができた。
MCR
センサ特性計測
GP2S40の特性を調べる。
センサから床までの距離は1mmとし黒色と灰色の境目上を0,5mm単位でセンサを移動し、その時の出力を計測した。
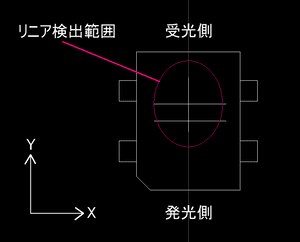
上図のようにリニアに検出できる範囲はX軸方向に2mm、Y軸方向に2.5mmであり、Y軸方向に受光側に0.5mmの偏りがある。
X軸方向の偏りは計測しそびれた。
迷走中
以前書いていたメモを読んでいると
コースチェンジはオフセット
というメモ書きを発見した。下図のような事を考えていたようだ。
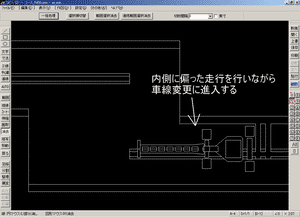
車線変更では予め内側を走行している方が容易に走行できそうであるが、50cm程度でロボットの位置をずらせるかどうかが疑問であるし、位置をずらしている過渡状態でロボットがラインに対して傾いた場合にどう対処すればいいかも分らない。
しかし面白そうなので実装を目指す。20mm程度オフセットできるようにセンサ配置を再び考える。
今後の予定
今年度のロボットの機械設計を一旦止め、昨年度のロボットを利用して発砲エンビ材を用いたセンサーバーや配置を変更したセンサの検討を行う。
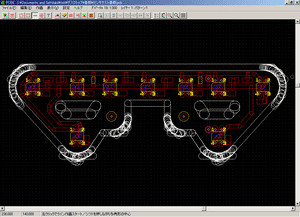
また、電気系の設計も開始する。雑っと考えた結果以下のようなポートの使用方法になる。ポート3,4,9についてはCPUボード上にサブ基板を設けることで実装することになるだろう。
ポートA
入力:ロータリーエンコーダ
入力:ゲートセンサ
入力:坂道センサ
出力:モータ回転切り替え1
出力:モータ回転切り替え2
出力:モータ回転切り替え3
出力:ゲートセンサ電源
出力:LED(ブレーキランプ)
ポートB
出力:P-PWM1
出力:N-PWM1
出力:P-PWM2
出力:N-PWM2
出力:P-PWM3
出力:N-PWM3
出力:FREE-BREAK切り替え1
出力:FREE-BREAK切り替え2
ポート7
入力:ポテンショメータ(アナログ入力)
入力:右追従(アナログ入力)
入力:左追従(アナログ入力)
入力:右姿勢(アナログ入力)
入力:左姿勢(アナログ入力)
入力:(ジャイロ OR 引き込みセンサ)(アナログ入力)(予備)
入力:右クランク
入力:左クランク
ポート3
出力:7ビット LED
ポート4
入力:8ビット ディップスイッチ
ポート9
入力:プッシュスイッチ
入力:プッシュスイッチ
入力:プッシュスイッチ(予備)
あぁ両面基板が使いたい。
re:ロボットの加速性能
昨年度のロボットの加速性能を再び計測しました。
今回は積分値の誤差も8mmに抑えられているので正確な値のはずです。
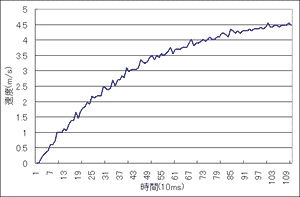
4m/sに達するまでに0.8秒程度掛かっています。
新品のモータを使用すればもう少し良い値が出るかもしれません。
昨年度の車の重量は約700g、ギヤ比は60:8、タイヤ径は35mmでした。
部品発注開始
ロボット製作に必要な部品の発注を始める。
部品入手は設計がほぼ固まったということで始めているので、これ以降大幅な機構の変更は認めない。
色々と手を付けたい物もあったが今年のロボットでは見送る。見送った内容はAWD化、自作サーボギヤ等で、これらについては次の機会に実現をしたい。
ロードマップ
今年の作業予定を描く。
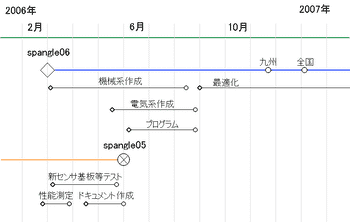
設計・製図や部品の選択・入手等があるが、横須賀大会の頃には一応完成を目指す。
私が間違っておりました。ノイズ対策
先のエントリのコメントでetsuさんが仰っていたようにモータにコンデンサを取り付けたところノイズが大幅に減少しました。
今まで電源に乗るノイズが問題だからFET出力部にコンデンサ付けとけば良いと思ったていましたが間違っていました。モータからは電磁波もたくさん放出されるようです。
モータ缶にもコンデンサ取り付けるようにします。
あああぁぁ何やってんだ
ロータリーエンコーダからの入力ノイズを調べるために速度を積分してみたところ、
実際の直線部分の長さよりも長い値が出てきました。
ああああああ。
つまり、今まで使っていた情報はデタラメ。フィードバックも無茶苦茶。参加者レポートの速度部分も間違い。
ああああああ。
急いで差し替え願いを出すが(今見たらメールの文面もメチャクチャ)、どうなる事か。
ああああああ。
間違ったデータ掲載してもらってゴメンナサイ。迷惑かけてゴメンンサイ。
本当に何やってるんだ俺。あ”ー