福岡工業大学のFITホールで行われた福岡県マイコンカーラリー技術交流会に参加してきた。
だれでも参加できる交流会のため宮崎、鹿児島、佐賀、長崎からも参加があり、合計50人超えるイベントとなった。
午前は井上先生によるAdvanced Classの技術講習。
速くするには覚悟が必要という意識付けの後に
福岡工業高校が全国に出場するようになってからの技術蓄積を
TypeS基板を登載したロボットの設計を通して解説を頂いた。
車体全体の設計思想だけでなく、各ユニットの解説やその加工方法も紹介された。
なお、講義で使われた資料は嘉穂総合高校のサイトにて一般公開されている。
ここ数年で公開された資料の中でも最も濃い物なので、声に出して10回くらい読んでおくと良いと思う。

午後は走行会。
一時間のフリー走行の後に、一人2回走行でのベストタイムによる競技が行われた。
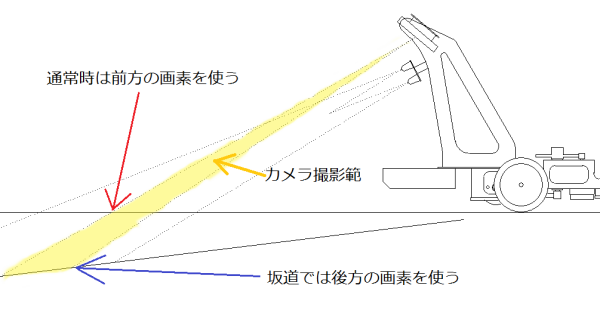
フリー走行では、スタートすら出来ない状況で久々に焦った。
この処理の副作用でスタート時に、スタートバーについて行ってしまう。

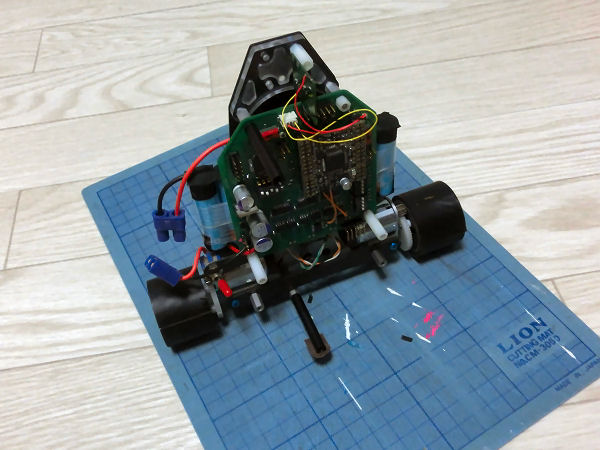
人が集まると、面白い物も出てくる。↑これはカッコいい。
3Dプリンタで作られたトラス構造の美しいフレーム。