
参道を抜け、

出雲大社にお参りして、

出雲そばを食べて、

もう一杯食べて、

今年もk先生のお誘いで、中国地区マイコンカー研究会に参加させて頂く。

二日間に渡って中国地区の先生や生徒さんと調整に明け暮れる。
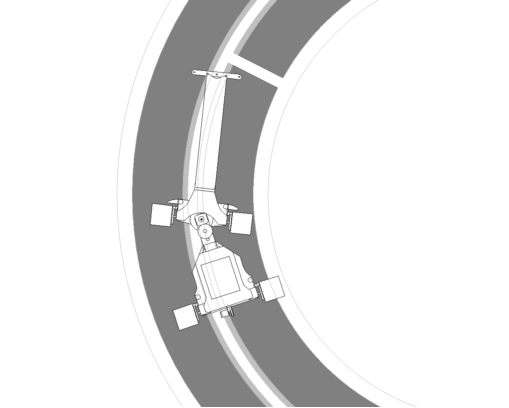
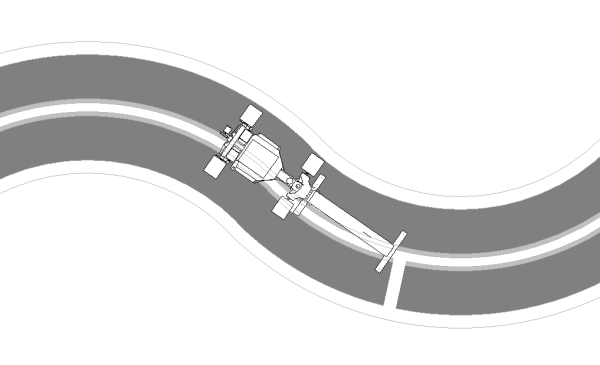
ルネサス大会に近い感じの強グリップコースでの蛸壺はなかなか走り難い。
フルグリップな走行軌道から急に後輪がブレイクしてしまう。タイヤが滑る兆候が掴めない。
結局は後輪の駆動力を下げたほうが綺麗に曲がれるようだ。
他にも坂の頂上で減速が間に合って無かったり、下り坂後のコーナが不安定だったりと色々修正。
有意義な走行会でした、ありがとうございました。
RMCR 2014
福岡県大会

嘉穂総合高校で行われた県大会にてエキシビション走行の機会を頂く。
ついでに記録用動画の撮影も。
年季の入ったコースのためか、各所でタイヤの滑って面白い。
運営の皆様、参加者の皆様お疲れ様でした
ハーフラインの誤検出対策
ハーフライン後にコーナが現れることは無い。
ハーフライン検出後は操舵角度を監視して、コーナに入った場合には通常走行に復帰する。
車線変更はハーフライン後120cm以内に設定される。そのため、130cmを超えてもハーフラインが無い場合には通常走行に復帰する。
センサーの跳ねの対策に、トレースラインが途切てもしばらくはトレースラインの監視を続け、誤検出の場合にはトレースラインの途切れ待ち処理に戻す。
ハーフラインの検出条件
コーナー区間にハーフラインは設置されない。
操舵角度が大きい場合にはマーカー検出を無効にする。
S時コーナの途中にハーフラインは設置されない。
操舵速度が速い場合にはマーカー検出を無効にする。
材料変更
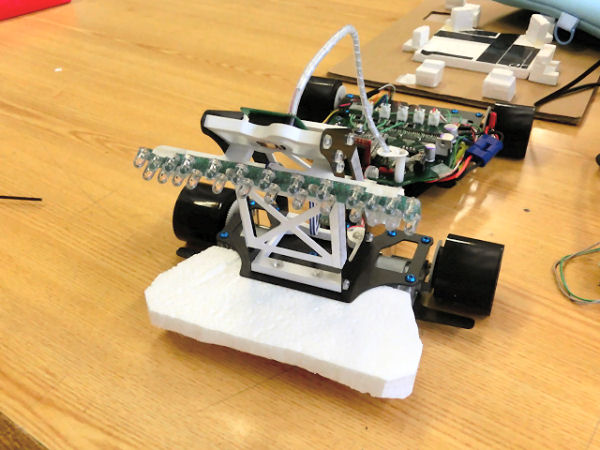
とにかくオーバーハングを軽くしたい。
発砲スチロールでバンパーを作ると、発砲ウレタン製の半分以下の軽さになった。
が、当然ながら走行性能に変化無し。
そして見た目が悪い。
追記
元:5.1g
発砲スチロール1:2.3g
発砲スチロール2:2.2g
コース補修

カッティングマシンを入手したので
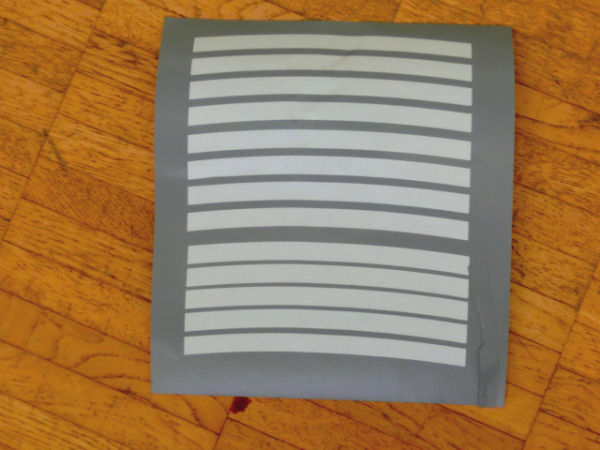
カッティングシートを切って

これを

こうする
カメラ制御コード
残り4つということで、だいたい1年前のコード公開
-
/*
PB.DR.BIT.B3 CLK
PB.DR.BIT.B2 RESET
PB.DR.BIT.B1 START
PF.DRL.BIT.B1 STRB
AN0 Image DATA
PB.DR.BIT.B16 LOAD
PE.DRL.BIT.B15 SIN
PE.DRL.BIT.B14 SCLK
PFC.PAIORL.BIT.B6 = 1; 右
PFC.PAIORL.BIT.B7 = 1; 左
PFC.PAIORL.BIT.B8 = 1; 同期
PFC.PAIORL.BIT.B9 = 1; 中央
PFC.PAIORL.BIT.B10 = 1;
PFC.PAIORL.BIT.B11 = 1;
PFC.PAIORL.BIT.B12 = 1;
PFC.PAIORL.BIT.B13 = 1;
PFC.PAIORL.BIT.B14 = 1;
PFC.PAIORL.BIT.B15 = 1;
*/
#include <machine.h>
#include <stdarg.h>
#include "iodefine.h"
#include "sci.h"
#include "7125sio.h"
#define CLK_H PB.DR.BIT.B3=1
#define CLK_L PB.DR.BIT.B3=0
#define SCLK_H PE.DRL.BIT.B14=1
#define SCLK_L PE.DRL.BIT.B14=0
#define WAIT for(i=0;i<1000;i++){}
/*======================================*/
/* プロトタイプ宣言 */
/*======================================*/
void main(void);
unsigned char dipsw_getL( void );
unsigned char dipsw_getH( void );
void setReg(unsigned char data );
/*======================================*/
/* グローバル変数の宣言 */
/*======================================*/
unsigned int watc=0;
unsigned char reg[16];
unsigned int h_cnt;
unsigned int adcnt;
unsigned char data[256];
/************************************************************************/
/* メインプログラム */
/************************************************************************/
void main( void )
{
unsigned int pri_v,pri_h;
int i,j;
char dif,min,max,minad,maxad,out;
unsigned char rf,lf,lsh;
unsigned char blevel,wlevel;
char mr,ml;
unsigned char digisensor;
/* マイコン機能の初期化 */
init_all(); //初期化
sci1_init(38400,8,0,1);
reg[ 0]=0x00;//Image Capture Mode 0 = Continuous Mode
reg[ 1]=0x10;//NA
reg[ 2]=0x20;//Interrupt setting
reg[ 3]=0x30;//Data Rate 0 = 1/4
reg[ 4]=(0x40|(dipsw_getL()+3));//露光時間 3=285fps 2=303fps 1=323fps
reg[ 5]=0x50;//露光時間
reg[ 6]=0x60;//露光時間
reg[ 7]=0x70;//露光時間
reg[ 8]=0x86;//Gain
reg[ 9]=0x90;//MSB setting
reg[10]=0xA0;//Black level output
reg[11]=0xB0;//Offset subtraction
reg[12]=0xC0;//STRB
reg[13]=0xD2;//NA
reg[14]=0xE0;//Power save mode
reg[15]=0xFE;//NA
lsh=30+dipsw_getH()*10;// 1=100 2=120 3=140
//black=30~40
RESET:
digisensor = 0x00;
WDT.WRITE.WTCNT = 0x5A00;
PB.DR.BIT.B2=0;//リセット H -> L
CMT0.CMCNT = 0;
CMT.CMSTR.BIT.STR0 = 1;//cmt0 スタート
while(CMT0.CMCNT<150){CLK_H;CLK_L;}//200us待ち
CMT.CMSTR.BIT.STR0 = 0;//cmt0 停止
CLK_H;
CLK_L;
PB.DR.BIT.B2=1;//リセット L -> H
CMT0.CMCNT = 0;
CMT.CMSTR.BIT.STR0 = 1;//cmt0 スタート
while(CMT0.CMCNT<75){CLK_H;CLK_L;}//100us待ち
CMT.CMSTR.BIT.STR0 = 0;//cmt0 停止
CLK_H;
CLK_L;
setReg(reg[ 0]);
setReg(reg[ 1]);
setReg(reg[ 2]);
setReg(reg[ 3]);
setReg(reg[ 4]);
setReg(reg[ 5]);
setReg(reg[ 6]);
setReg(reg[ 7]);
setReg(reg[ 8]);
setReg(reg[ 9]);
setReg(reg[10]);
setReg(reg[11]);
setReg(reg[12]);
setReg(reg[13]);
setReg(reg[14]);
setReg(reg[15]);
RESTART:
CLK_H;
CLK_L;
PB.DR.BIT.B1=1;//スタート
CLK_H;
PB.DR.BIT.B1=0;//スタート信号戻す 920ns リセット開始から0.5ms後
CLK_L;
CLK_H;
i=0;
WDT.WRITE.WTCNT = 0x5A00; //2.73ms以内にクリア
NEXTREAD:
while(PF.DRL.BIT.B1==0){//STRBシグナル待
CLK_L;
CLK_H;
}
AD0.ADCR.BIT.ADST = 1;//AD変換開始
if(i==0){
PA.DRL.BYTE.H = digisensor;//xxxx x001
PA.DRL.BIT.B8 = 0; //mainCPUへの同期信号クリア
}
CLK_L;CLK_H;
CLK_L;CLK_H;//STRB -> L
CLK_L;CLK_H;
while(AD0.ADCSR.BIT.ADF == 0);//AD変換終了まで待つ
data[i] = AD0.ADDR0 >> 8; //値を保存
i++;
if(i<128){goto NEXTREAD;} //32*5= 160
setReg(0x21);//Set STOP=1
min=-10;
max= 10;
minad=0;
maxad=0;
//ライン重心計算
for(i=1;i<29;i++){
dif=data[i+95]-data[i+96]; //96 97
if(i<24 && dif
}
if(min==-10 || max==10 ||(minad>maxad)){
out=63;
}else{
out=(minad+maxad);
}
PA.DRL.BYTE.H = out<<2;
/* ラインマーカしきい値計算 */
blevel=200;
for(i=65;i<=91;i++){
if(blevel>data[i]){blevel=data[i];}
if(blevel>data[i+32]){blevel=data[i+32];}
}
wlevel=blevel+lsh;
digisensor=0x01;
//左マーカ
if(data[ 99]>wlevel || data[ 67]>wlevel){digisensor= digisensor | 0x40;}//0100 0000
//右マーカ
if(data[ 89]>wlevel || data[121]>wlevel){digisensor= digisensor | 0x04;}//0000 0100
//中心ライン
if(data[109]>wlevel || data[110]>wlevel || data[111]>wlevel || data[78]>wlevel){
digisensor= digisensor | 0x10;}//中央線 0001 0000
if(data[104]>wlevel || data[ 72]>wlevel){digisensor= digisensor | 0x20;} //左中マーカ
if(data[116]>wlevel || data[ 84]>wlevel){digisensor= digisensor | 0x08;} //右中マーカ
PA.DRL.BIT.B9 = 1;//
PA.DRL.BIT.B8 = 1;//同期線L->H
goto RESTART;
}
/************************************************************************/
/* ディップスイッチ値読み込み */
/* 戻り値 スイッチ値 0~15 */
/************************************************************************/
unsigned char dipsw_getL( void )
{
unsigned char sw=0;
if(PE.PRL.BIT.B2==0){sw+=2;}
if(PE.PRL.BIT.B3==0){sw+=1;}
return sw;
}
/************************************************************************/
/* ディップスイッチ値読み込み */
/* 戻り値 スイッチ値 0~15 */
/************************************************************************/
unsigned char dipsw_getH( void )
{
unsigned char sw=0;
if(PE.PRL.BIT.B0==0){sw+=2;}
if(PE.PRL.BIT.B1==0){sw+=1;}
return sw;
}
/************************************************************************/
/* レジスタ書き込み */
/* */
/************************************************************************/
void setReg( unsigned char data )
{
int wt=0;
//SCLK_Lからスタート
//adress
if((data&0x80)==0x80){PE.DRL.BIT.B15=1;}else{PE.DRL.BIT.B15=0;}
SCLK_H;SCLK_L;
if((data&0x40)==0x40){PE.DRL.BIT.B15=1;}else{PE.DRL.BIT.B15=0;}
SCLK_H;SCLK_L;
if((data&0x20)==0x20){PE.DRL.BIT.B15=1;}else{PE.DRL.BIT.B15=0;}
SCLK_H;SCLK_L;
if((data&0x10)==0x10){PE.DRL.BIT.B15=1;}else{PE.DRL.BIT.B15=0;}
SCLK_H;SCLK_L;
//data
if((data&0x08)==0x08){PE.DRL.BIT.B15=1;}else{PE.DRL.BIT.B15=0;}
SCLK_H;SCLK_L;
if((data&0x04)==0x04){PE.DRL.BIT.B15=1;}else{PE.DRL.BIT.B15=0;}
SCLK_H;SCLK_L;
if((data&0x02)==0x02){PE.DRL.BIT.B15=1;}else{PE.DRL.BIT.B15=0;}
SCLK_H;SCLK_L;
if((data&0x01)==0x01){PE.DRL.BIT.B15=1;}else{PE.DRL.BIT.B15=0;}
SCLK_H;
PB.DR.BIT.B16=1;//LOAD_H
CLK_H;
PB.DR.BIT.B16=0;//LOAD_L
SCLK_L;
CLK_L;
}
走り収め
福工にて最終調整。来週末はガンバロー。
変更点
・車線変更区間の終了直後に操舵が暴れる
車線変更復帰後のオフセット走行の解除が雑
段階的にオフセットを減らすように変更
・高速で直線からコーナへの進入するとコーナ中盤でアンダー
コーナ進入直後の減速不足
前輪でも若干のブレーキを掛ける
後輪が滑り出したので後輪のブレーキを弱める
・コーナ終盤でのアンダーステア
前輪の駆動力を弱める
・コーナ終盤でのオーバーステア
後輪外輪の駆動力を弱める。代わりに後輪内輪の駆動力を強める
コーナ進入時の減速は最大でも精々0.6G程、そんなに荷重移動も起きないはずなのだけど、毎回毎回梃子摺るのは何か思い違いしているような気がする
