
RMCR 2015
こつこつ

車体の剛性が高いほど
不意のオーバーステアやアンダーステアが減少して、
コーナ走行時の再現性が高くなる傾向がある。
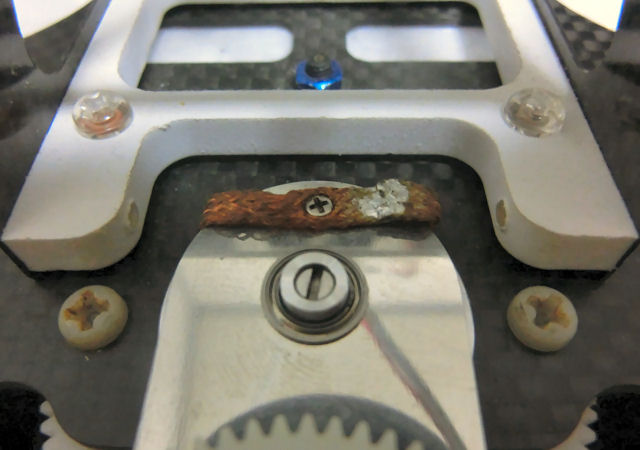
で、車体の捩れ剛性向上のため、
操舵軸周りをアルミ材に置き換える
カーボン製:7.23g → アルミ(7075?)製:9.98g
部品自体は間違いなく硬くなったけれど、
車体に組んでみると、捩れ難さは目に見えては分からない。
問題は操舵軸の一点ではなく、車体全体に広くあるような気がする。
走り収め
戸畑工業にお邪魔させて頂く。
が、まったく走らず。コースアウトや停止してしまう。見てみると
組電池の半田付けが外れていたり、LEDドライバへの電源ケーブルが断線したりと完全なメンテ不足。
修理して走らすと、通常上体に戻って一安心。
手こずっていたオプセルタイヤ。
前回までの取り組みで、組み立てはソコソコできるようになったっぽく、
皺が入らずに走行を終えることができた。
こつこつ

続き
・ホイルの上に一枚テープを張ってから、粘着付きオプセルを張る
⇒剥がすときの作業性がアップした。
・一度スポンジ全体を潰して柔らかくしてからタイヤ作る
⇒効果が分からない
さて、タイヤの作り方と走らせ方の両方に問題がありそうではあるが、
すぐに、シリコンシートの下地のテープとスポンジが剥離してしまう。
常用している薄手のOPPテープは粘着力が弱いので、
以前選定したヤツを選ぶことに。
(当初、よさげだったP40Mは長時間保管で若干伸びるようで、#484のほうがメインに)
このおかげで剥離はなくなったのだが、まだタイヤに皺がよってしまう。
次の課題は、おそらくテープを張る際の圧力。
若干スポンジをつぶし気味にして組むと良さそうだが、
均一な圧力でテープを貼り付ける作業は難しく
簡単には出来そうに無い。タイヤを丸く作れない。
そこで、スポンジへの均一な圧力の代わりに、
スポンジの変形量を一定にしながらテープを張れるジグを作って、タイヤを作ってみる。
さてどうなるか?
冬用タイヤ
気温が下がりポロンが使えなくなるので、オプセルでタイヤを作る。
少しでも作業性を上げるために粘着付きの物を選んでいるが、
その粘着材の粘着性が高く、また基材無しのスポンジ直なので、
再度の張替え時に剥がすのに苦労する。
ふと思いついて、ホイル表面にOPPテープを一枚張って、
その上から粘着付きオプセルを巻いてみる。
剥がすときに楽になることを期待。
ポロンと比較して、へたり易いスポンジで、
スポンジを手でつぶしていると、明らかに柔らかくなる。
下手に走らせて、大きな皺が一度できると、
それ以降、皺が出来やすくなる癖になるのは、
皺の部分だけ柔らかくなるせいだったのだろうか?
では、スポンジの状態で全体をいったん潰して、
一様に変形しやすい癖を付けてからタイヤにすると、
この問題は起き難いのだろうか?
マイコンカーラリー大会in出雲科学館
約1ヶ月前になるが、今年も出雲に行ってきた。

八雲本店で朝食

神楽殿と

八足門前からお参り

開会式

大会コース、2回のタイムアタック後に、1時間ほどフリー走行タイム。その後3回目のタイム計測となった。

大会当日の試走用コース
ありがとうございました&おつかれさまでした。
LED基板更新

0.3mm厚の生基板から削り出す。
約0.3g軽くなって6.2gに。
操舵軸ベアリング変更

技術交流会にて指摘を頂いた操舵軸の捻り方向へ剛性不足というかガタ。
HMさん曰く、軸を支えている上側のベアリングの内外輪間の距離が変化している。
見直してみると、たしかに動いている。
この部分には内径5mm/外径8mmのノーブランド品ベアリングを使っていた。
ということで、定格荷重のアップも含めて外径10mmのNSK MF105ZZに変更してみる。
試してみると、
まずは、内径の精度が良い。
交差+0/-0.02mmで作ったシャフトが半圧入気味に入った。
そして、内外輪間の距離の変化は目では分からない感じ。
結果。操舵軸の剛性があがった。
RMCR2015夏

豊洲に移って初のルネサス大会
青森から長崎までの全国から100人超のエントリで行われた
超久々に大会に来た強豪や、ロボマガやTVの取材もあって賑やかな感じ。
予選走行を開始しようとするとバッテリのケーブルが断線していた。これが逆境だ。
k氏にコテをお借りし修理からのスタートになった。
大会での はんだ作業はたぶん10年間で始めて。
修理を終えて予選開始
あらかた予定通りの走りとタイム。
山口でも気になっていたR450蛸壺は,やっぱり走行ラインが安定しないので速度を落として走らせることに。
今回もCMA-さんがかっ飛ばしていて2位で予選通過。
上位のタイムが拮抗していたので5位で走行を切り上げる。これが増長だった。
走行時間が終わり、結果画処理ロボットの3台が予選通過。
ついに画処理にきたHMさんも流石のタイム。
決勝トーナメント
直前になってトーナメントの山選びに失敗していることに気づく。
そして、なんどめだ黒雲雀。
今回はCMA-さんにもk氏にも一歩及ばず。
目標が出来たので次に向けてコツコツやろう。

技術交流会ではメカ設計に沢山の駄目だしを頂いたような?気がする。
大会を運営してくださったルネサスの皆様や参加者の皆様。
楽しい時間をありがとうございました。
山口へ

N先生にお呼びいただき萩商工へ
部員も多く活発な部活で、2日とも到着すると既に十数人全員が揃って部室の掃除や活動を始めており、大きなトラブル以外は自分でロボットの加工や調整を進めていく。
部室には地区大会より長いコースがあり、R450の5連蛸壺やダブルクランク、マーカから最長最短のクランク&車線変更等がある全国大会決勝以上の難易度のレイアウトになっていた。
走らせて見ると思ったとおりで、マーカーの見落としや車線変更での復帰復帰失敗など色々と問題箇所が明るみになった。
学生さんも速く走るために苦心しているようで、コーナでの駆動力配分の紹介やマーカーの検出やクランクの走らせ方等をアドバイス。タイム向上に繋がれば良いが。
最近導入されたオリジナルマインドのSR420とCut2Dの新バージョンも触らせていただく。Cut2D Desktopは切削の使い勝手が良くなっているようで自宅環境もアップデートを検討する。
2日にわたりご対応いただき、本当にありがとうございました。
当日は気づかなかったが、坂の頂上で危ない状態になっている。原因は坂の上り終わりと下り始めでマーカー誤検出により車線変更モードに入ってしまっていた事にある。ココも判定の見直しが必要