電chu! Ustreamより
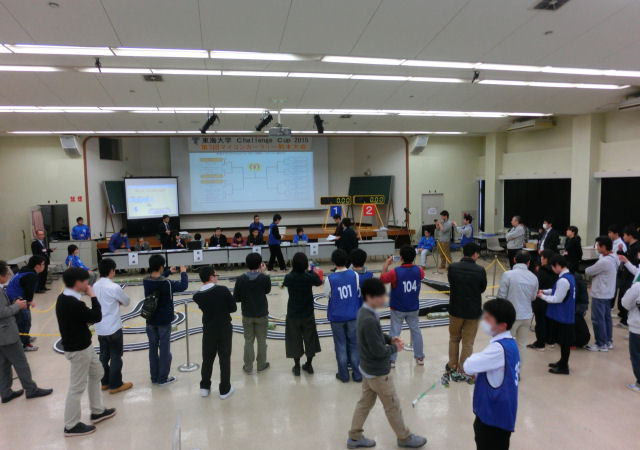
大阪電気通信大学で行われた電通大杯に参加してきた。
今年も北は札幌、南(西?)は長崎までの全国から90人超の人数が集まる大イベントだが、今年はさらに大阪電気通信大学中継チームによる高品質の中継が行われた(Ustreamから中継の一部が視聴可能、実況席による解説まである徹底ぶり)
大会コースは長さ50m後半位の一般的な広さになったが、坂道区間の直後にクランクが設置されている。Basicならクランクまでの減速できるかどうか不安になり、Advancedならばクロスラインを読み落とす可能性があるレイアウトで最大の難所となっていた。
昨年画像処理部門を苦しめた光環境は、ガラスの壁面にシートを張ったおかげでコントラストの急激な変化は少なくなったようだが、昨年より良い天気だったために全体としては明るい状態。
午前中は回数無制限の試走時間。
何回走らせても坂下クランクでコースアウトしてしまう。
色々不具合が重なっているようで、数回の修正ではどうにもならず5回試走して完走無し。
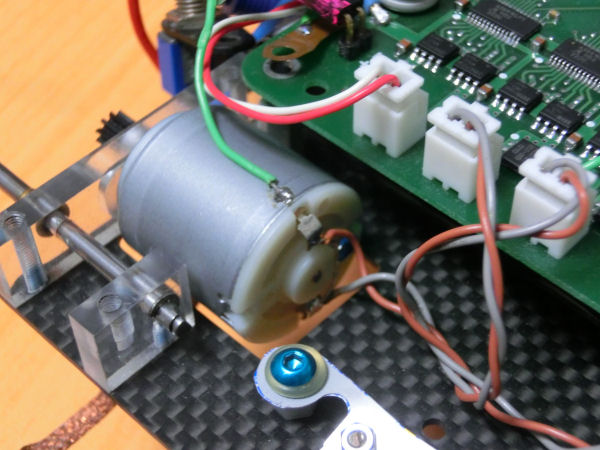
さらにはコースアウトの衝撃で駆動ギヤも欠けだして、大ピンチ。
当初の予定では、大会の様子を写真に収めたり、情報収集して回るつもりだったが、それどことろではない。
午後からは競技開始。
1回目の走行でも坂下クランクでコースアウト。膝から崩れ落ちる。
ちなみに画像処理部門全体でも完走が無く、走行距離による順位付けの時代に戻りそうな感じである
6回連続でコースアウトすると、もう、開き直るしかない。
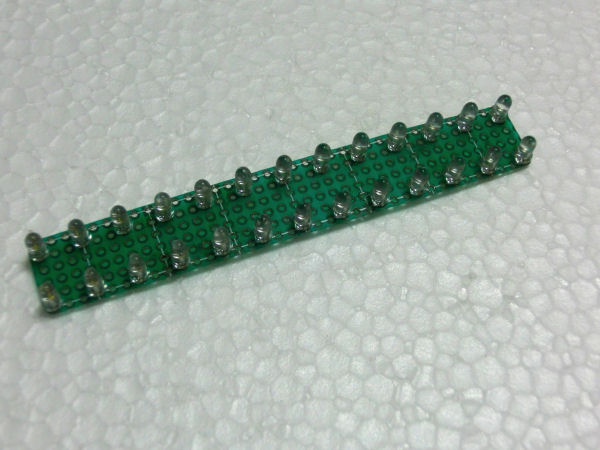
クランクの処理を今回のコースでのタイミングとセンサデータの変化パターンに合わせて、そのタイミングのみ動くような感じに作り直す。
実レイアウトでの確認はできないので簡易コースで1回走行して致命的不具合が無いことのみ確認、あとは天に祈るのみ。
2回目の走行。
焦ってスタート準備にミスる。
仕切りなおしてスタートは、なんとか完走。
結果的には部門唯一の完走となり1位取得。

競技終了後にはインタビューを しどろもどろ 受けたりエキシビションで大敗したり。
大会後は部室にて懇親会。電通大杯の楽しみの一番でもあるが、気疲れで酔いが回る。
大会を運営して下さった大阪電気通信大学自由工房の皆様、素晴らしい配信をして下さった電chu!の皆様、参加者の皆さんお疲れ様でした。