マイクロマウス2019に参加する。結果はマイクロマウス競技ファイナル13位。
全面探索と斜め走行を導入した今シーズン。ファイナルでの斜めは成功しなかったが、全探索とオートスタートができたので良しとする。
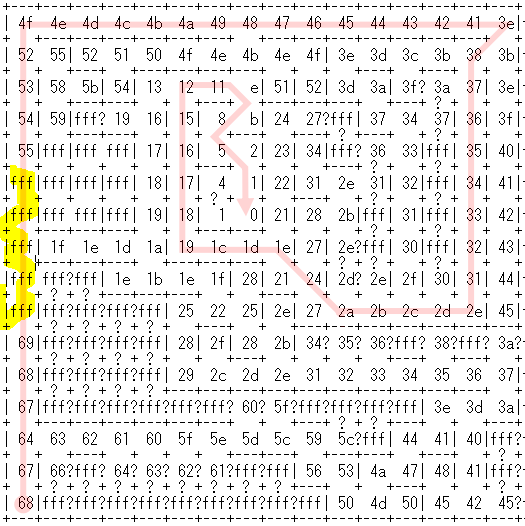
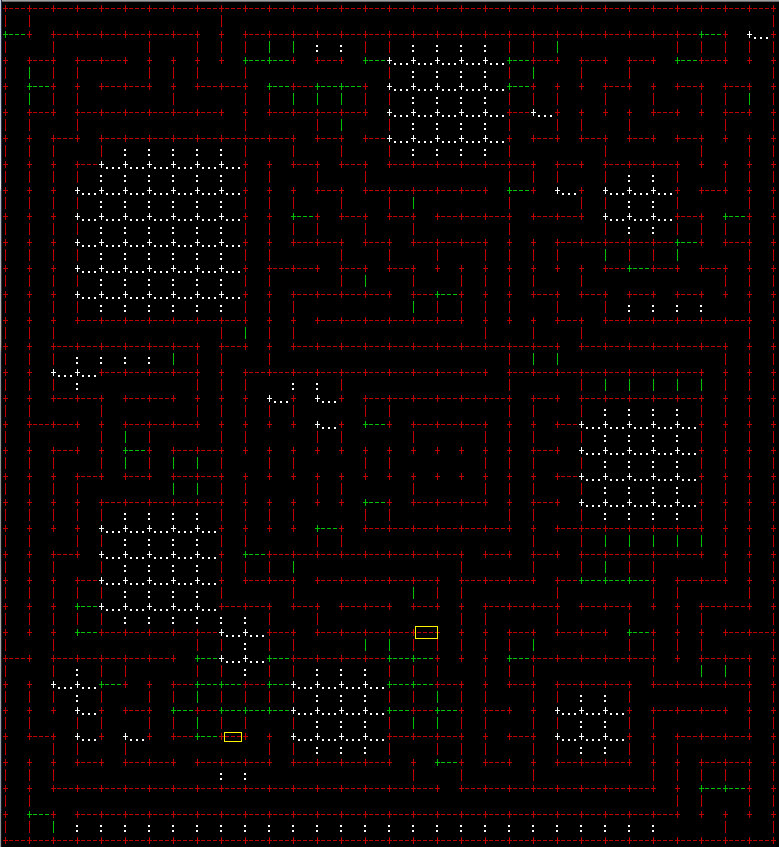
探索
上の図は読みだしたマップで、黄色枠のところが読み間違っている。スリップでズレた時の物だろうか。
今回の探索は最初のゴールまでは足立法
5分までは一辺の壁も見ていない区間をゴールにして全探索を行い
その後は最短経路上の未探索区間をゴールにして探索を行う。(最短経路の再計算は袋小路などで停止した時にのみ行う)
6分経過後に未探索区間の確認が済んだらスタートに戻るようにしていた
(そのため、6分経過後も戻ってこなくて焦ったが)
最短
長い直線での距離ズレが 壁切れ補正の範囲を超えていたようだ
素晴らしい大会を運営してくださった皆様、ありがとうございました。