大阪電気通信大学で行われた2021年度マイクロマウス関西地区大会。2年ぶりの大会には約60人が参加し大賑わいで行われた。
快適な明るさの会場は、マウスには少し明るすぎたようで、前日の試走から大会を通して遮光に翻弄することに。そんな中、可視光センサのPicoがあまり影響を受けていないように見えた。なぜだろうか?
また、マイクロマウス競技の競技人口が増えていたのも印象的だった。HM-Starterが広げた裾野は大きい。
競技に参加したマイクロマウス部門の成績は2位。関西地区での入賞は初めてで嬉しい。景品のオシロスコープありがとうございます。

大会を開催してくださいました大阪電気通信大学自由工房の皆さん。参加者の皆さんおつかれさまでした。
パドックの様子

ロボトレースの設営の風景。
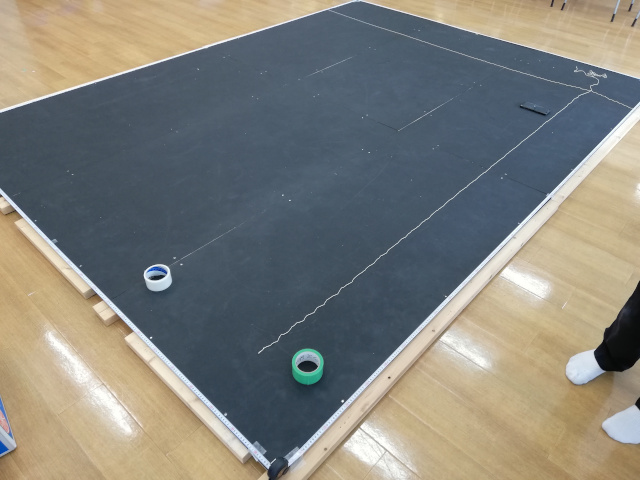
床材の4辺に設置したメジャーを読みながら、対辺のいる二人がタコ糸を引っ張ってX軸座標を位置決めし、さらにもう一組がY軸座標の位置決めすることで、コースの基準座標の印を付けていた。
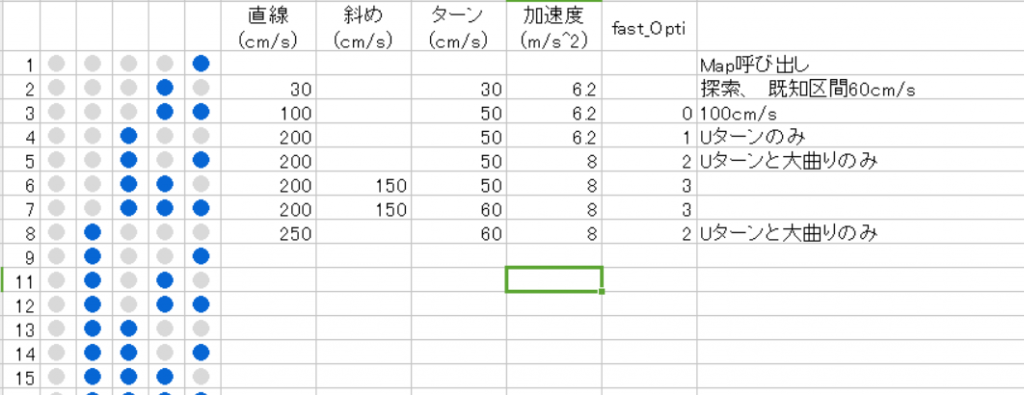
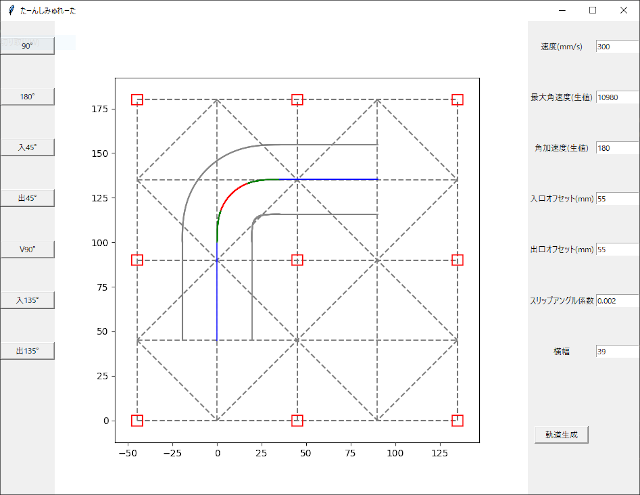
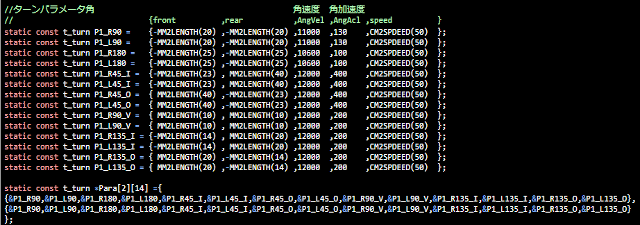 ターン毎のパラメータ格納を考える
ターン毎のパラメータ格納を考える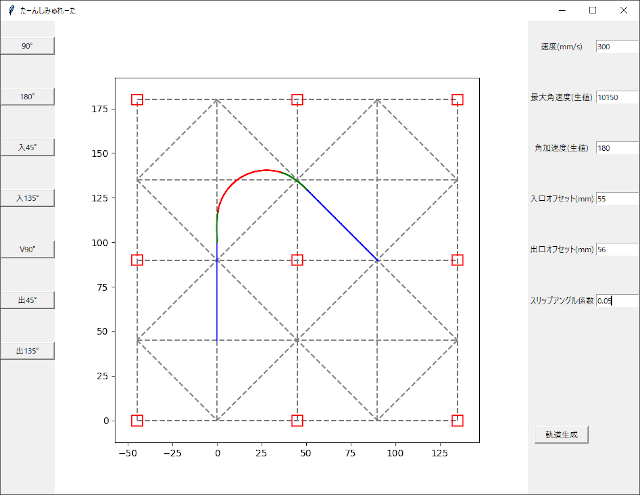
{kind=link}