大会を運営してくださった皆様ありがとうございました
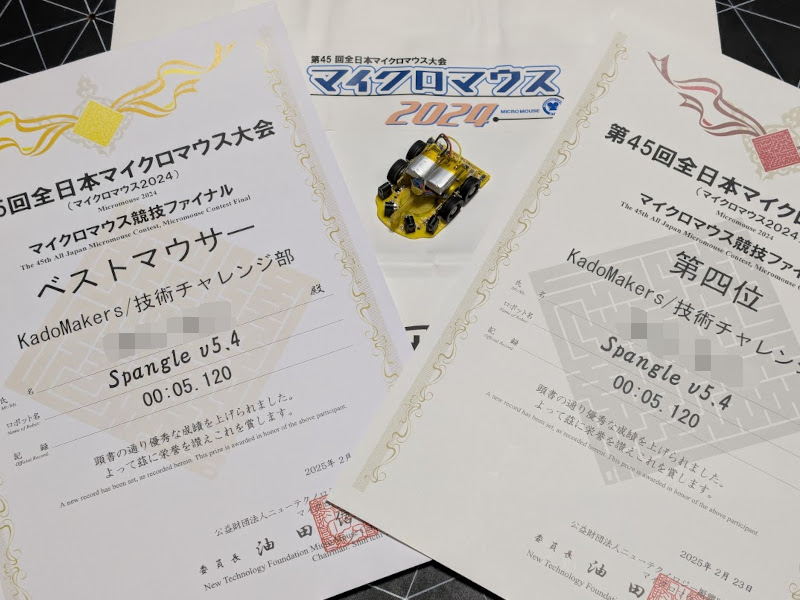
運よく全面探索に成功し最短走行成功させることができ、4位入賞とベストマウサーを頂きました。
全日本大会直前、探索走行の不具合が露呈して対応を余儀なくされた。既知区間加速の直後に見探索の直線がある場合に、壁切れでの距離補正すると1区間ずれる挙動をしていた。なぜか既知区間加速での壁切れ処理を取りやめると正しく動いているので、いったんは壁切れをやめて大会に臨むことに。
大会の試走日では探索走行が安定しない、壁を見誤ったり、停止位置がずれたり、先の不具合も再発していたようだった。悩んだ挙句、既知区間加速の処理を全て取りやめて調整を終える。既知区間加速の処理は5年以上変えた記憶がないのだけれど今まで運がよかっただけなのだろうか?
大会本番、祈りながらの探索は運が味方して無事成功。既知区間加速がないことによるタイムロスは少なそうに見えたけれど、北の端の直線は時間切れで見に行かなかったのかもしれない
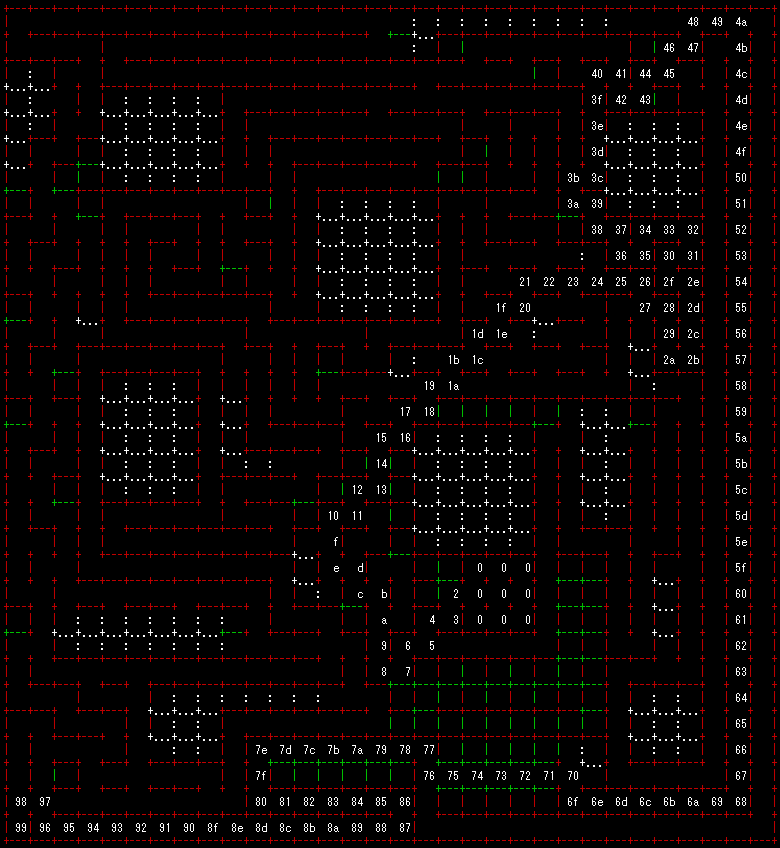
3走目の最短走行は安定パラメータのはずがクラッシュし、4走目はゴール区画に入りきれず記録なし。もしかしたら減速中に壁に当たると何か不具合があるのかもしれない。
最終走行は仕方がないのでほぼMAXパラメータを選択して、運よく最短走行成功。
この走行のパラメータは直線速度5.5m/s,直線加速度40m/ss~20m/ss,斜め速度5m/s,斜め加速度30m/ss~20m/ss,90°ターン2m/s,180°ターン1.8m/s,V90と斜め45°侵入が1.6m/s,その他が1.7m/sという去年よりも攻めたパラメータ。おかげで魔王まで0.5秒まで近づくことができた。
素晴らしい大会を運営してくださった皆様、ありがとうございました。