8/11に開催されたreRo杯に初参加する。多くの参加者に恵まれて普段の練習会場とは別の建屋での開催になっていた


談笑する参加者、始終楽しく穏やかな雰囲気で大会は進行

トロフィー

競技ではほぼ最大パラメータで3位、選手層が厚くて手厳しい。
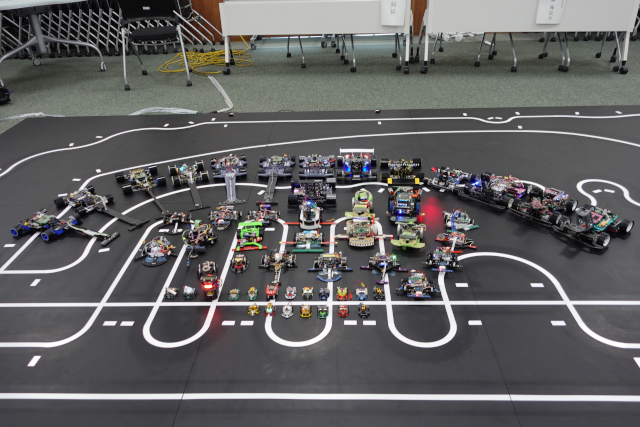
競技後のロボットの集合写真
大会終了後の懇親会はピザパ
素晴らしい大会を運営してくださったreRoの皆様ありがとうございました

大阪電気通信大学で行われた2024年度マイクロマウス関西地区大会、今年のエントリは去年と同じ111台の大盛況で大きな大会となりました。スタッフ、来賓、参加者を含め皆様お疲れ様でした。
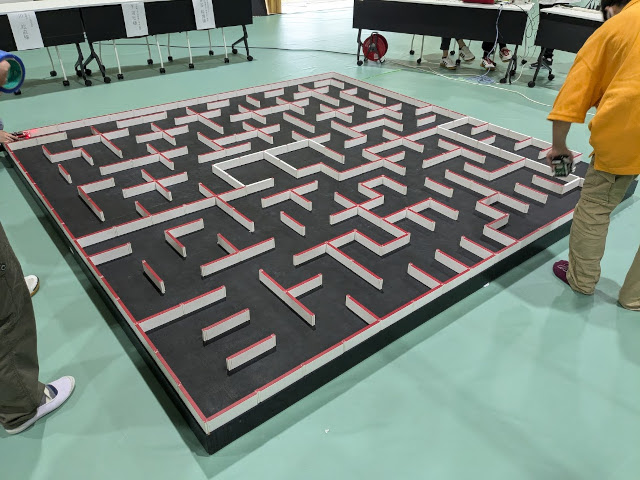
土曜の早朝から始まった会場設営は多くのスタッフのパワーによって迅速に進み、午後1時からは試走会が開始できました。

今年は3競技を並列して進めて競技時間を短縮するために3つの競技台も土曜日から準備して、撮影カメラも3セット組体制になりました。
クラシックマウスの試走ではスタートとゴール位置を2か所にして試走の行列のスループットを倍増させました。
個人の競技成績はクラシックマウスで完走、マイクロマウスでは思いも寄らない上位入賞で3位になりました。
CL-0614-10250-7を試してみる。結果リポの2セルあたりを直結して使うと良さそうな感触を得た
サイズが大きいため電力効率向上の可能性もあるけれど、Spangle v5.1は回路の都合で5Vまでしか印可できないので本モデルでの採用は見送り
3.6V印可時吸引力:25g 消費電力:168mA/7.2V(静止時、マイコンなどの電力含む)
5.0V印可時吸引力:59g 消費電力:197mA/7.2V
6.0V印可時吸引力:86g消費電力:185mA/6V(モータのみ)
6.5V印可時吸引力:98g消費電力:200mA/6.5V(モータのみ)
idle電流 67mA
迷路のバックアップの方法を変える
これまでは探索のフェーズ(ゴールとか前面探索完了とか)と起動からの累積時間毎(4分、5分、6分)で迷路を保存していたが、その保存の間にクラッシュすると前の保存以降に探索した迷路の情報をすべて破棄するようになっていた
今回は、クラッシュした場合にクラッシュしたと判定した座標の周囲の2区間(25マス)分のデータのみを破棄して、その他の区間の迷路情報は更新するように変更してみた
マイクロマウスタックチャンの開発を進める
・壁情報の保存と、液晶に壁情報の表示ができるようになった
・割り込み動作がわからない
割り込み禁止と解除の
noInterrupts()/interrupts()とportENTER_CRITICAL(&timerMux)/portEXIT_CRITICAL(&timerMux)は動きが異なるように見える。
少なくとも割り込み内で値が書き換わる変数に対して、普通のところからアクセスするにはnoInterrupts()/interrupts()が必要そう
・壁センサの角度
筐体のサイズの制約から前壁センサを真っすぐに向けたが、これが良くない。左右の前壁センサが平行なために、前壁との角度が見えにくい
・モータ駆動電圧
ステッパーモータのトルク不足を補うために、M5stack内蔵の5Vを利用しようとしたが過電流でM5ごとリセットしてしまう。内臓昇圧回路の前段にPMCが入っていてそちらの制約が大きい模様。
昇圧を使いたい場合にはリチウムイオン電池の出力に別の昇圧回路をのせて対応するしかなさそう
追記(情報提供ありがとうございます)
noInterrupts()はArduinoで用意されている関数で、ESP32の場合なら内部的にはportDISABLE_INTERRUPTS()を呼び出す
タイマー割り込み内の排他制御を行うのがtimerMux変数で、割り込み自体を止めるだけのがnoInterrupts()ではないか

昨年の全日本大会では5走目が時間切れになってしまった。あと10秒あれば時間内に走りきれた可能性もあるため、今年は探索時間の削減に取り組む。まず導入した探索走行の時間削減の内訳は以下のとおり
①不要なバック走行の削除
その場回転時に壁切れを確実に行いたいため回転後にバックする処理を入れていたのを見直す。左右の壁が確実に見えた場合にはバック走行をせずに、その場から次の走行に移る。バック走行は1秒未満だけれど32×32の迷路になると、その回数が多いので効くはず
②最短経路上の未探索区間の導出のタイミング変更
壁の反対に未探索区間がある場合に、袋小路に入らない場合は、未探索区間まで走りにいってしまうことを修正する。
現在いる区間に隣接している未探索区間までの歩数が長い場合には、いったん止まって未探索区間の再計算を行う
③オートスタートまでの待ち時間
探索ではないけれど、探索走行完了からのオートスタート開始までの待ち時間を7秒から5秒に短縮する。7秒は感覚的にも長かった
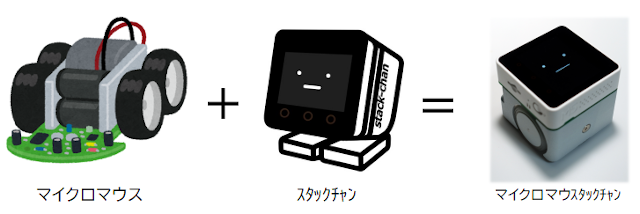
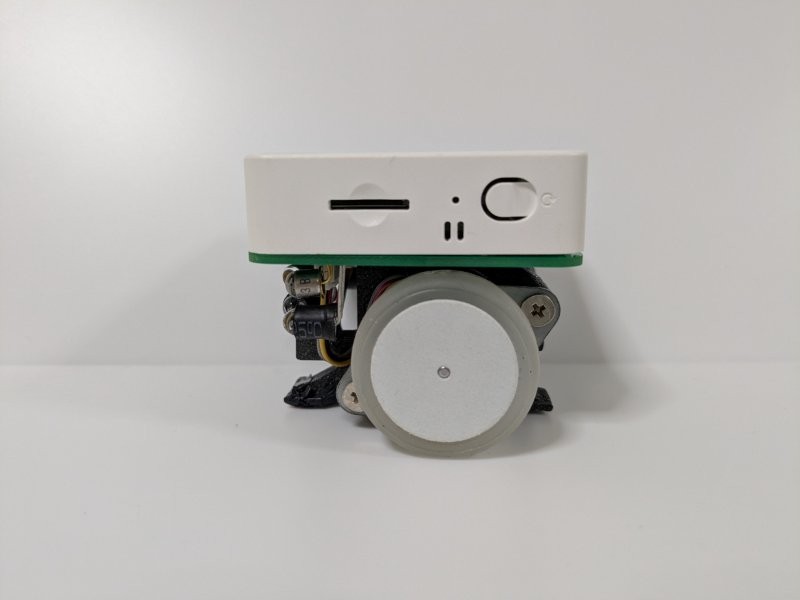
マイクロマウスタックチャンはスタックチャンとマイクロマウスが合体したスーパーカワイイロボットです。
こんな感じで迷路を走り回ります
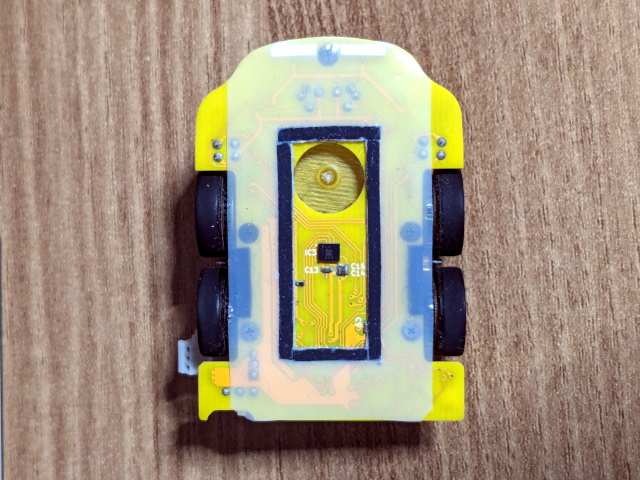
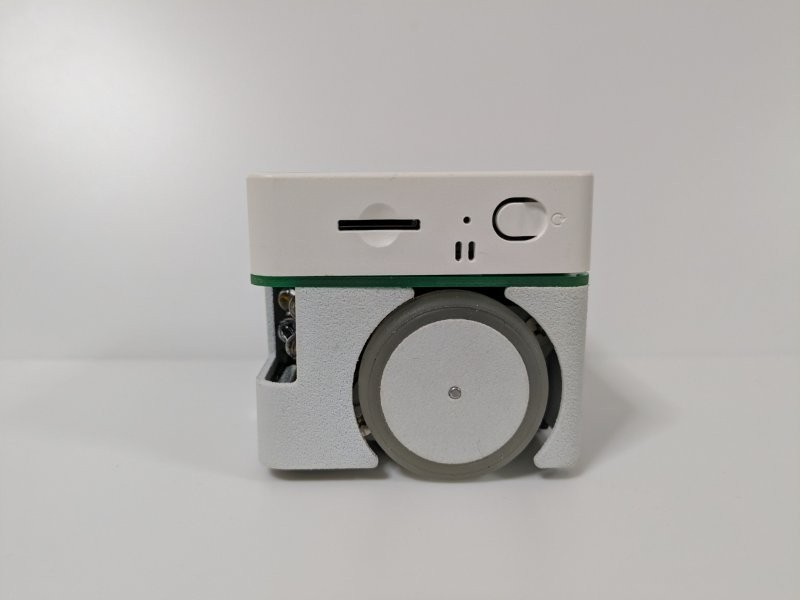
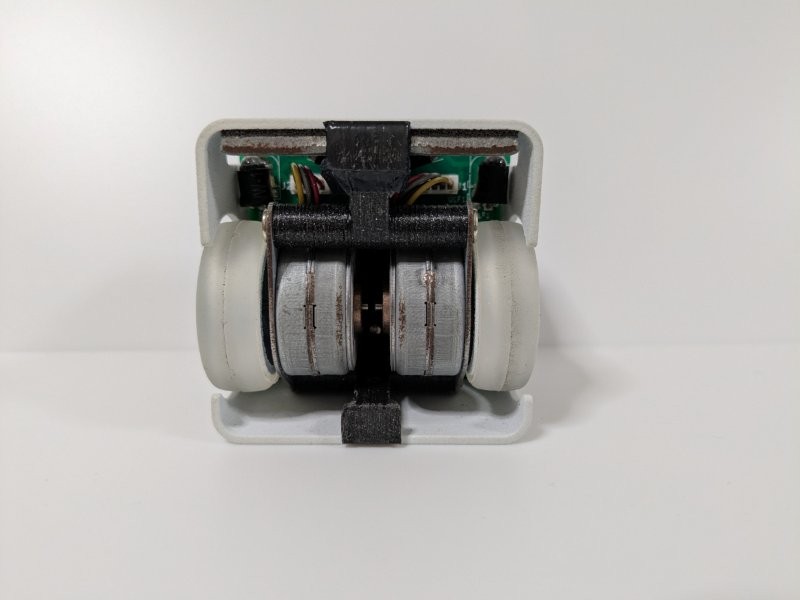
マイクロマウスタックチャンはM5Mouseをリスペクトしたロボットですが、M5Mouseと違い駆動系を含めてM5Stackのみで制御しています。また、電源もM5Stackに搭載されているリチウムイオン電池1セルで動きます。
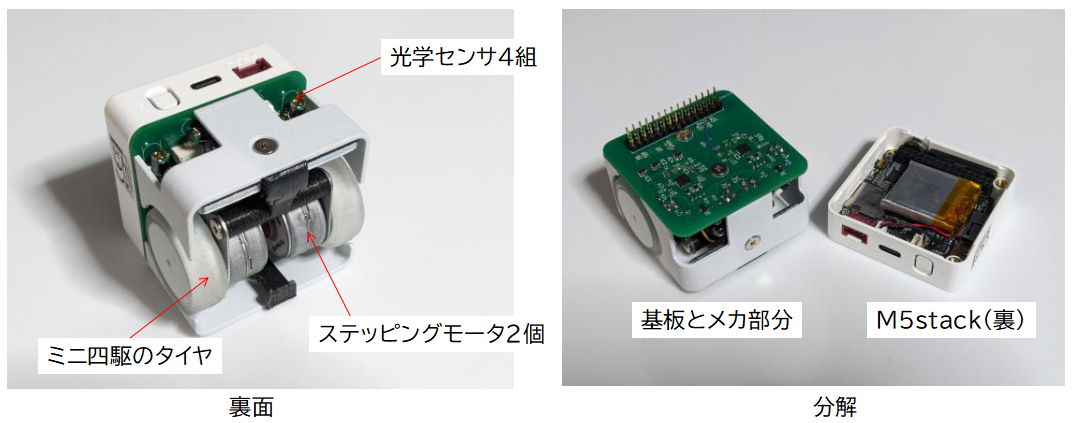
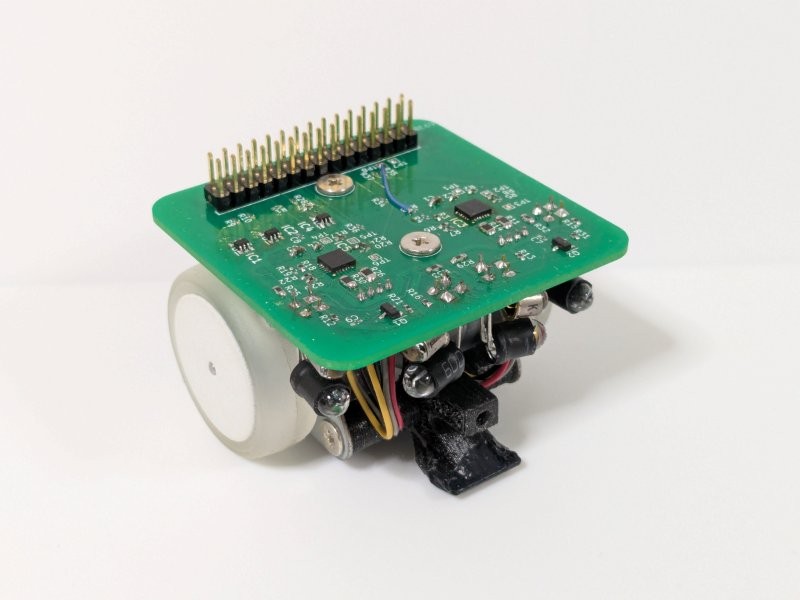
M5StackのIO数でやりくりするために、モータはステッピングモータを利用してモータ制御に使うIOを4ポートに抑えています。また、前後左右の壁センサは[右前&左横]と[左前&右横]の2組のセンサをマルチプレクサで切り替えて使用することで、ADCポート2個と切換え信号、赤外線LEDのON/OFF用の合計4ポートに抑えています。
スペックシート
スペックシートのモータは品番間違いでPortescap 26M048B1Bを搭載
回路図
タイヤ:ミニ四駆グレードアップパーツ No.366 大径カーボンホイールセット(ソフトスリックタイヤ付)
ソフトウェアhttps://github.com/pidream/moustackchan01




関連機体:マイクロマウスタックチャン(響CMスタックチャン)
関連機体:マイクロマウスタックチャンハーフ化計画
雑誌掲載:I/O 2025年7月号 page 19-20