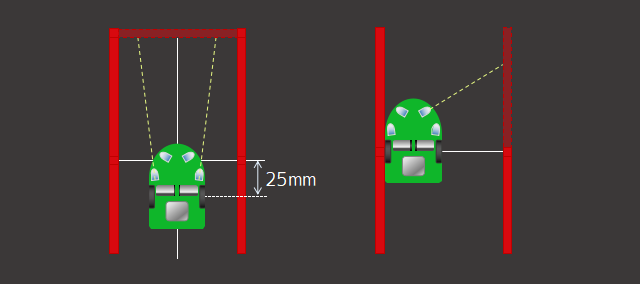
壁検出の閾値を確認する
前壁
目標:柱位置-20mmで検出
実測:柱位置-25mmが閾値
横壁
目標:壁と反対側端に車体があるときも検出
実測:壁と反対側端に車体があり、かつ、壁が10mm離れている場所が閾値(感度を上げ過ぎていたような)
壁検出の閾値を確認する
前壁
目標:柱位置-20mmで検出
実測:柱位置-25mmが閾値
横壁
目標:壁と反対側端に車体があるときも検出
実測:壁と反対側端に車体があり、かつ、壁が10mm離れている場所が閾値(感度を上げ過ぎていたような)
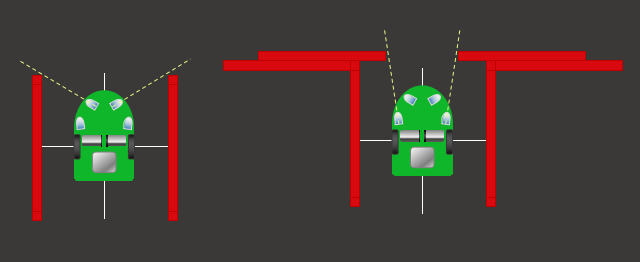
光軸の合わせ方のノウハウが無いので試行錯誤する。
横センサは、車体を区間中心に置いてから少しづつ前に進ませた時に、左右同時にセンサの反応が消える(ある閾値以下になる)ように角度を合わせる。上図左
前センサは、車体を区間中心に置いて、半区間前の左右から壁を突き出して行き、同じ突き出し量で左右の前センサが反応するように角度を合わせる。上図右
次にセンサ感度の調整
赤外LEDの発光から、その相手のフォトトラ出力のADC取り込みまでの時間で調整する。
フォトトラの応答はインパルス波形になるので、その最初の立ち上がり波形のどのタイミングで取り込みかで調整する
センサ感度を調整した後、もう一度光軸を微調整して完了とする
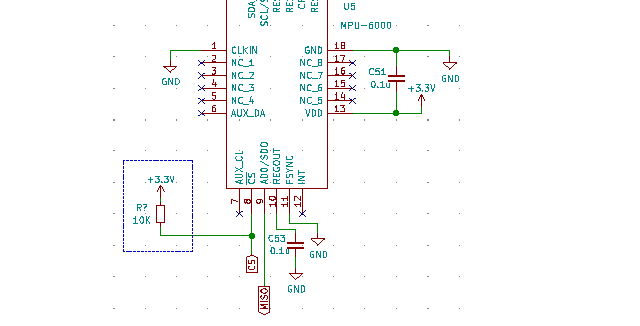
ジャンパー1本目。SPIの~CS端子にPUを忘れていた。
問題となったのはMPU-6000の動作で、電源投入時にアサートされているとクロックの入力に関係なくSDOから何かしらの信号を出すようだ。
今回の回路では、MPU-6000のSDO端子はRX631のPC7に繋がっている。PC7端子はファーム書き換え時にブートモードで起動するためにLである必要があるが、SDOがHになるタイミングによって、上手くブートモードで起動できない場合があった。
現在のアルゴリズムめも
最初のゴールまで:
・ゴール座標を目的地にして歩数のみで足立法
・Uターン発生時の停止中に仮想壁や枝刈り処理を実施
ゴール到達後の累計探索時間5分まで:
・4方向の壁のうち1方向も分からない区間をゴールとして歩数のみで足立法
・Uターン発生時の停止中に仮想壁や枝刈り処理を実施
・すべてのゴールに到達たら探索打ち切り
累計探索時間5分経過後:
・スタートからゴールまでの重みづけあり(計算量大)のルート上の未探索区間をゴールにして、歩数のみで足立法
・Uターン発生時の停止中に仮想壁や枝刈り処理を実施
・スタートからゴールまでの重みづけありのルートを再計算
・すべてのゴールに到達したら探索打ち切り
・6分経過以降にUターンが発生したら探索打ち切り
最後:
・スタート座標を目的地にして歩数のみで足立法
/////////
現在、時間のかかる重みづけありのルート計算は走行停止中のみ実施しているが
既知区間加速走行中やターン中に行えそうである
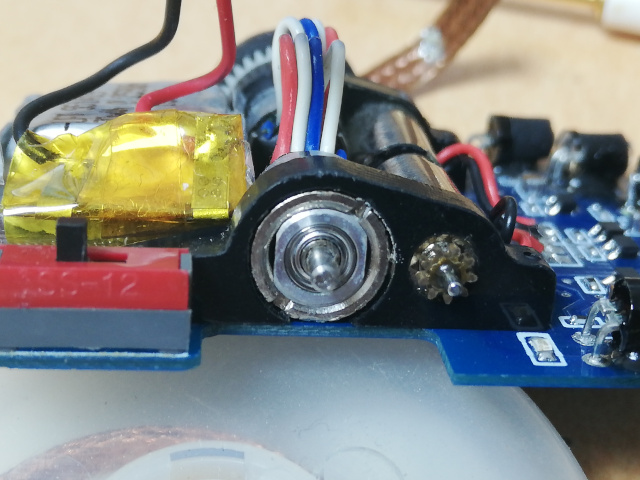
マウスを始めてからそのエンコーダにはネミコンの7Sを使用している。
このエンコーダは(内径6mm細目ネジの)ナットで固定するタイプのだが、付属してくるナットは大きくて使いにくい。
代替品を探した結果、3.5mmステレオジャックの固定用のナットが同サイズだったので使用している。
CUI Devices 3.5MM-NUT-E

左:付属ナット(0.37g) 右:3.5MM-NUT-E(0.23g)
マイクロマウスではホイルとタイヤを両面テープや接着で固定している人もいる。
どの辺の物が良いのだろうか
備忘録(おそらくCNCの部材固定用に購入、MCRのスポンジ貼り付けにも使用している)
・ニチバン NH-H15 :0.11mm厚
・寺岡 No.7220 ? :0.15mm厚
ホイルの寸法(ロードクリアランスやモータ軸との距離の兼ね合い)の調整用に0.2mm厚が欲しい
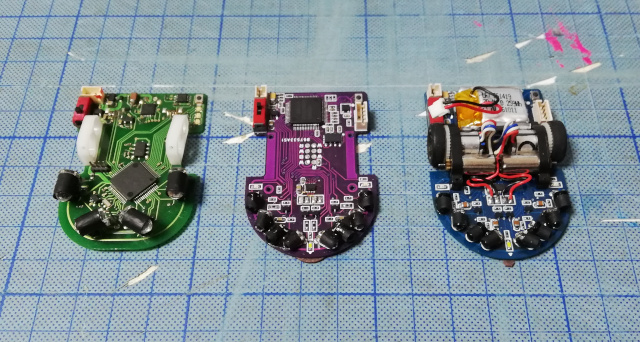
覚え書きである。
初代
発光素子:SFH4550
受光素子:RPM-012PB
2代目
2代目(改)
発光素子:LTE-209
受光素子:LTR-4206E
センサ角度
初代
前:1度
横:30度
2代目
前:9.5度
横:35度
これがキツかった。
進行方向に対しての車体角度が傾いていると前壁をうまく検出できなかったり
左右方向に車体がズレていると、斜め前の区間の前方の壁を横壁と誤検出したりと
ソフトの補正をだいぶ入れることとなった。
2代目(改)
前:5度
横:30度
今のところ使っていて問題は無しと感じている
段差等でタイヤが空転したときに走行距離が短くなる問題
距離カウントを左右のエンコーダの和で求めると空転したタイヤのパルスもカウントするが、
速度の遅い側の値×2を使えば空転の影響をなくせるのではないか?
→影響減った
別問題で加速度や速度を上げていくと、スリップにより走行距離が短くなる物についても対応したい
→少し効いたっぽい
マイクロマウス2019に参加する。結果はマイクロマウス競技ファイナル13位。
全面探索と斜め走行を導入した今シーズン。ファイナルでの斜めは成功しなかったが、全探索とオートスタートができたので良しとする。
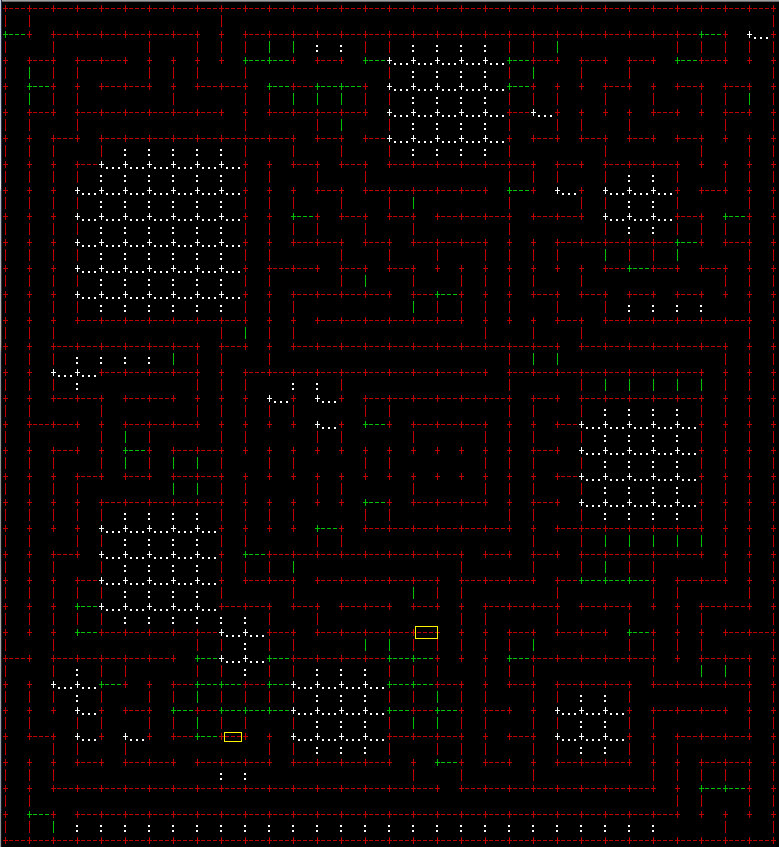
探索
上の図は読みだしたマップで、黄色枠のところが読み間違っている。スリップでズレた時の物だろうか。
今回の探索は最初のゴールまでは足立法
5分までは一辺の壁も見ていない区間をゴールにして全探索を行い
その後は最短経路上の未探索区間をゴールにして探索を行う。(最短経路の再計算は袋小路などで停止した時にのみ行う)
6分経過後に未探索区間の確認が済んだらスタートに戻るようにしていた
(そのため、6分経過後も戻ってこなくて焦ったが)
最短
長い直線での距離ズレが 壁切れ補正の範囲を超えていたようだ
素晴らしい大会を運営してくださった皆様、ありがとうございました。