熊本高専で行われたマウス九州地区大会に参加する
東日本からの変更点は
・タイヤをホイルに両面テープで固定
・物理距離からパルス数への変換関数の修正
・ゴール区間の4マス対応
・最短走行のルートに算出に重み付けが反映されていなかった不具合修正
・直線速度と斜め速度Up
で、結果は4位。なんとか全日本のファイナルに進めそうだ。
大会を運営してくださった。熊本電波高専の皆様ありがとうございました。
初手のターン速度を探索と同じにしているのの遅さがだいぶ気になる。
熊本高専で行われたマウス九州地区大会に参加する
東日本からの変更点は
・タイヤをホイルに両面テープで固定
・物理距離からパルス数への変換関数の修正
・ゴール区間の4マス対応
・最短走行のルートに算出に重み付けが反映されていなかった不具合修正
・直線速度と斜め速度Up
で、結果は4位。なんとか全日本のファイナルに進めそうだ。
大会を運営してくださった。熊本電波高専の皆様ありがとうございました。
初手のターン速度を探索と同じにしているのの遅さがだいぶ気になる。

パシフィコ横浜で行われた東日本大会に参加する。ロボフェス2019のイベントのため会場は大賑わい。
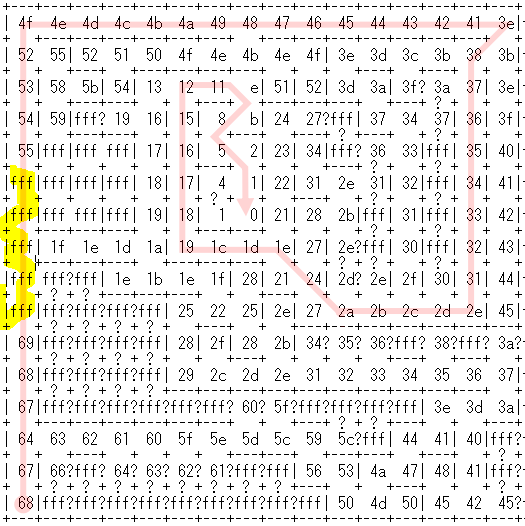
競技は、今回は斜め走行を成功して上限パラメータでの完走ができた
迷路と歩数マップ。本来赤線のルートを取るはずだったのだが、黄塗部が計算打ち切りで処理されてなかった
楽しい大会を運営してくださった皆様ありがとうございました。

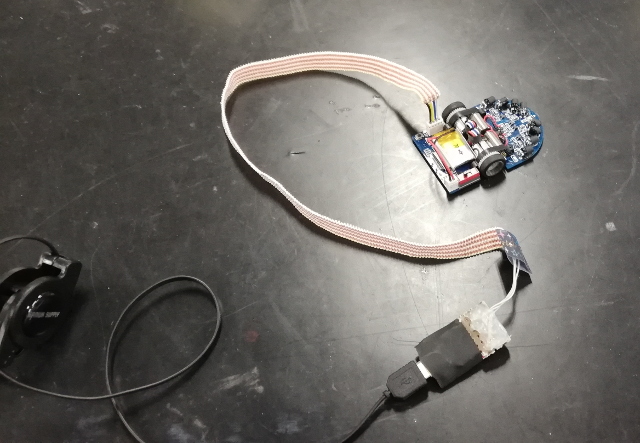
リポの固定を両面テープから変更してみる
以前に機材の固定に良くつかっていた[ひっつき虫]。微妙に接着性のあるベタつかない粘土みたいなやつ
ぜんぜんわからない。私は雰囲気でマウスを直進させている。
横壁の値を直につかっての壁トレースってどの程度の人がやっているのだろう
串区間とか壁切れのタイミングの制御むずかしい
今はジャイロの値を元に真っ直ぐ(目標角0度)走らせながら、(ジャイロのみでPD)
・壁に近づいた場合に走る目標角度を壁から離れるように変更
・串区間では左右の壁切れが起きるタイミング(距離)の差ををつかって目標角度を変更
・片壁では、8mmくらいの前(過去または後ろというのか)の壁との距離が離れていたら、近づくように目標角度変更
に
ターン直前に進行角度が変化するのを防ぐために、直線の最後の半区間ぐらいは目標角度の増減の割合を減らしている
///
やりたいのは壁と水平になるようにすることで、中心をはしるかどうかは二の次のはず
大阪電気通信大学の駅前キャンパスで行われた関西地区大会
今年は天候も良く多くの参加者が集まった

クラシックの競技を一時中断して会場全体が注目したロボトレ最終走者(アニキ)
斜めないと辛いレイアウトだったが、準備を進めていた斜め最短が運よく成功した
みなさまお疲れさまでした
//////////////
・ハーフの迷路は左右の迷路の間にワッシャーを5枚入れて締めると、締結時に山にならなくていい感じになる
・会場設営で一番工数かかるのはロボトレで、これ以上の時短はできるのか??
既知区間加速実装
//////
YouTubeのスタビライズ機能、上の動画のような手振れの修正に便利だったのだが、いつのまにか廃止されていた。

・なんで、ゴール区間の入り口右折してたのだろう
→同一歩数の場合に西向きが最優先になってた
・最初の180ターンが、90度づつのままになっている
→180度ターンへの置き換え処理が、その前後の直線が30区画を超えると動作しない条件になってた。
マイクロマウス2018に参加する。結果はマイクロマウス競技ファイナル10位。
昨年のリベンジである32×32の迷路での完走も達成することができた。
楽しく、素晴らしい大会を運営してくださった皆様、ありがとうございました。