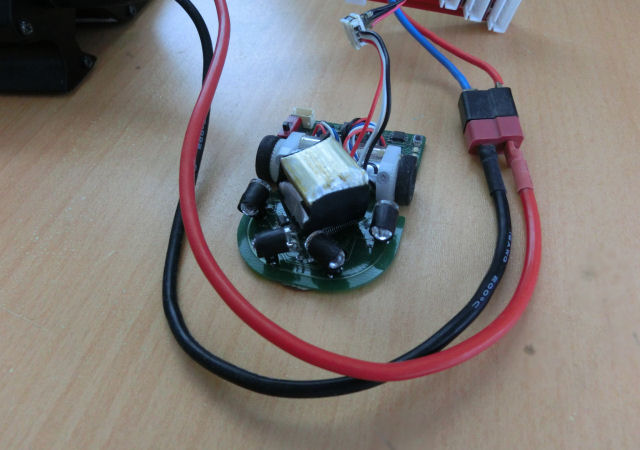
久々にハーフマウスを発掘して充電。
半年以上見てなかったソフトの解読から始める。
/////////////////////////////
大会アナウンスが無いMCRも、
念のためジュラルミン製のmainシャシを見積もり依頼してみる
久々にハーフマウスを発掘して充電。
半年以上見てなかったソフトの解読から始める。
/////////////////////////////
大会アナウンスが無いMCRも、
念のためジュラルミン製のmainシャシを見積もり依頼してみる
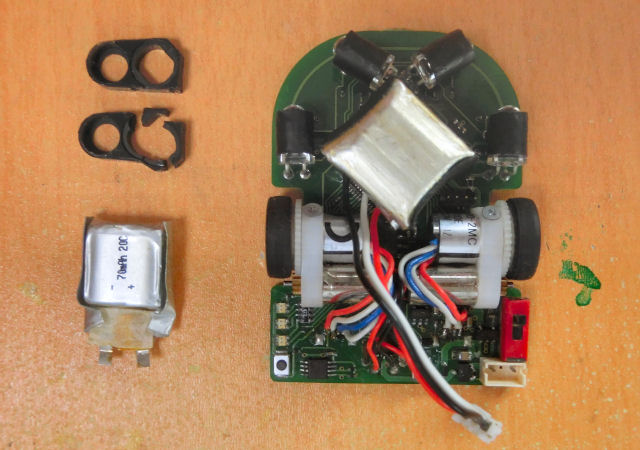
車軸を固定している部品を作り直す。
負担が掛かる場所の上に、設計が悪かったようで、3年目でついに壊れてしまった。少しでも強度を上げるため素材をABSからPOMに変更。
ついでに、痛んで容量が少なくなっていたリポ電池も新しいものに
壁を追加購入して迷路を一回り大きくする。
ついでに櫛区間の制御も考える
櫛区間の制御に左右の柱(壁)の途切れる時間差を使ってみる。
車体位置が左右にずれすぎていると離れている側の柱を検出できなくなり、補正が動かなくなるようだ。
最短走行時に180度ターンの動作を追加する。
ベースの精度が低いままの増築なので、さらに不安定に。
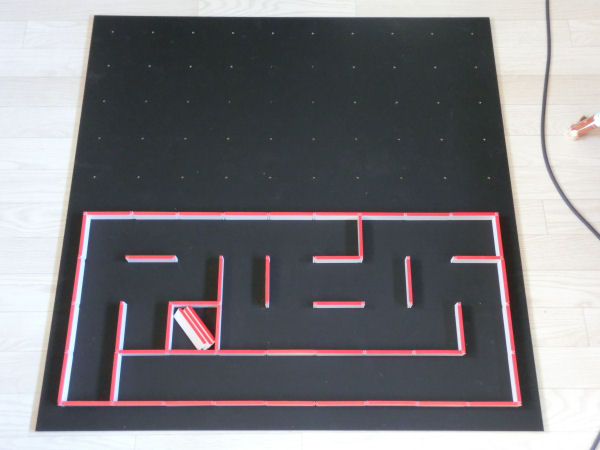
ハーフサイズマイクロマウス 迷路用 ベース(9×9)を購入する。
手持ちの壁の少なさから9×4のエリアだが調整環境が整った。
熊本高専で行われたマイクロマウス九州地区大会に参加してきた。
大会前日の昼から試走ができるため、一泊二日の旅程を組んでいたのだが・・・。
会場に到着して、一年ぶりな方々に挨拶と談笑。
それでは調整を始めよう。と、荷解きすると
マウスがない。
マウスがない。
探してもない。
やってもうた。
家に忘れてきた。
マウスを取りに帰ると、戻ってくるのは真夜中になってしまうため、
これにて試走日終了。

あぁ、懇親会楽しい。馬おいしい。
ホテルをキャンセルして、最終電車で自宅に戻る。
大会当日
最速経路を利用して再度熊本高専に。
色々と調整したいが、頭が回らず、そのまま競技開始。
本当に運よく、ふらつきながらも探索を終えて、
今回の目的である最短走行もできた。

結果は3位。
昼食は高専文化祭の出店で、お好み焼きとホットドックと焼き鳥と肉まんと揚げパンとうどんを食べる。

大変有意義な大会でした。
前壁による距離補正とコース情報のEEPROMへの保存。
赤外線センサのパルス発光が偶にミスるのを修正。
今年は制限時間内での最短走行成功を目指す。
九州大会ガンバロー
足立法のコーディングや、走行制御の見通しが厳しくなってきたので、
諦めて、Pi:Co Classicのソフトを移植する
で、前壁での位置合わせと、ポテンシャルマップ作成時に重み付けするように変更

マイクロマウスの樹脂性ピニオンが上手く固定できないので、
アニキに紹介頂いたKKPMOから真鍮ギヤを購入してみた。
11月20日 夜 webから発注
11月25日 夕 発送
11月29日 夕 神奈川着
12月01日 昼 手元に届く
さっそく取り付けてみると、穴系は丁度良く軽い圧入で固定でき、
歯型も良いようでタイヤの回転音が静かになった。