斜め走行の実装開始。
上手く動かせない箇所が多すぎて、関西地区には間に合わなそう
マイクロマウス
マウス合宿2016

福井で行われたマウス合宿に参加してきた。
発表や自由時間を通して、作り方や調整の仕方を教えていただく。
お疲れ様でした。
そして、東尋坊観光

こつこつ
横壁の途切れによる距離補正追加
安定して壁がある場合のみの条件なので、櫛区間では動作しない。
ついでに、
壁が途切れるまでターン開始を待つように変更
こっちは距離補正していないので、もう少し改変必要
5月練習会

マウス練習会に参加
以前までのソフトの内容を見直も、謎コードが沢山。
目下の課題は壁切れにより距離補正の実装。
ぼちぼち
久々にハーフマウスを発掘して充電。
半年以上見てなかったソフトの解読から始める。
/////////////////////////////
大会アナウンスが無いMCRも、
念のためジュラルミン製のmainシャシを見積もり依頼してみる
オーバーホール
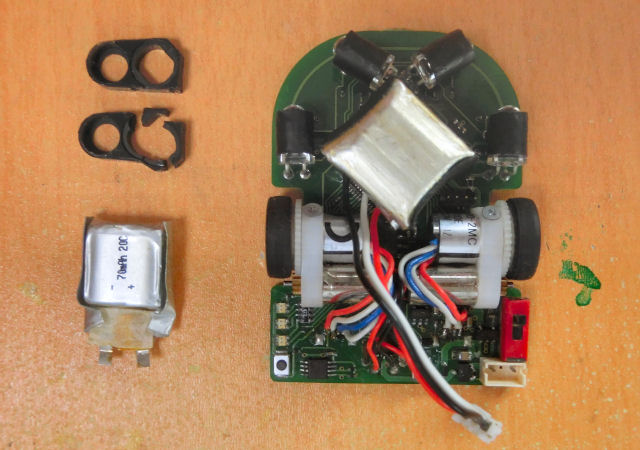
車軸を固定している部品を作り直す。
負担が掛かる場所の上に、設計が悪かったようで、3年目でついに壊れてしまった。少しでも強度を上げるため素材をABSからPOMに変更。
ついでに、痛んで容量が少なくなっていたリポ電池も新しいものに
迷路拡張
壁を追加購入して迷路を一回り大きくする。
ついでに櫛区間の制御も考える
櫛区間の制御に左右の柱(壁)の途切れる時間差を使ってみる。
車体位置が左右にずれすぎていると離れている側の柱を検出できなくなり、補正が動かなくなるようだ。
180度ターン追加
最短走行時に180度ターンの動作を追加する。
ベースの精度が低いままの増築なので、さらに不安定に。
コース拡張
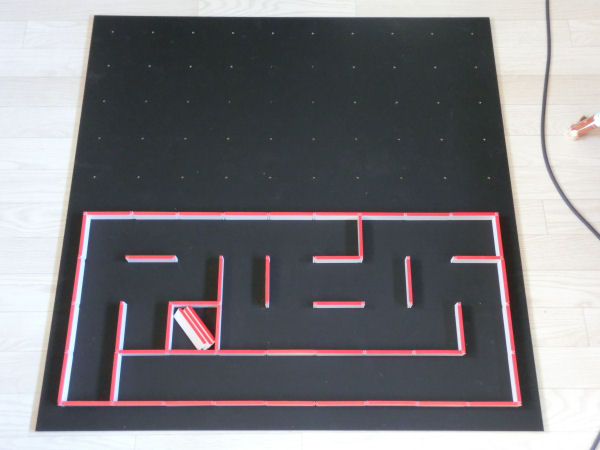
ハーフサイズマイクロマウス 迷路用 ベース(9×9)を購入する。
手持ちの壁の少なさから9×4のエリアだが調整環境が整った。