
なんかすごい所にお邪魔して内部の大会に参加してきた
試走時に全面探索に移らなかったり、吸引スカートが床に触れなくて十分な吸引ができなかったり
前者は前日に見直していたコードの不具合のようで元に戻すと意図した動きにもどった。原因は分からない
後者はファンを回した後に自動で走行開始していたのを、ファンの回転後に操作者が吸引を確認してからスタートするように変更。あんまり良い手ではないけれど…
試走から大会中、大会後も意見交換ができて、特にGitの使い方を見せて貰えたのは有難かった
イベントを開催してくださった皆様ありがとうございました
マイクロマウス
2022年度マイクロマウス関西地区大会
大阪電気通信大学の新設の体育館で行われた2022年度マイクロマウス関西地区大会。皆様お疲れ様でした。
パラメータはターン速度1.1m/s、直線速度2.5m/s、加速度15m/ssで、動きは悪くないのにタイムは伸びず。もっと良い経路を選ぶことが次の課題のようだ。
スカート変更
吸引スカートの素材を変更して1枚物を作ってみる。素材的には若干分厚く硬くなったが前回の複数の部品を組み合わせた構造よりは作りやすい。そして、精度が良くなったためか吸引力があがった
ピニオンの固定
やっと固定する方法が分かった。
ちなみに、これまで、シャフトにピニオンを挿入した状態で、シャフトとピニオンの境界部分にロックタイト601(あるいはメタルロック)を塗布して、ピニオンを少しづつ動かすことでシャフトとピニオンの隙間に接着剤を浸透させようとしていた。
しかしながら、この方法で固定しても、ピニオンが滑ることがあった。
今回やってみた方法は、ピニオン(孔径0.8mm、歯厚1.0mm)に
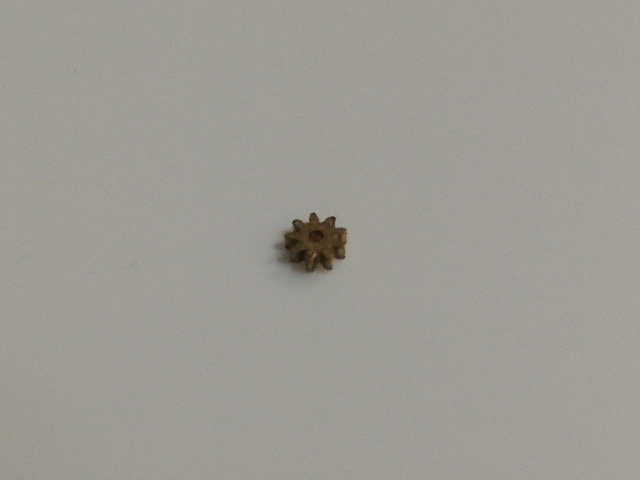
ロックタイト601をぶっかける

その後、ティッシュペーパーで孔の部分以外のロックタイトを拭きとり(ふき取っても孔部分の中にロックタイトが少量残る)、直ぐにシャフトに挿入する
(直ぐにピニオンをシャフトに挿入しないと、挿入が硬くて出来なくなるが、)挿入の直後からシャフトとピニオンが固定される
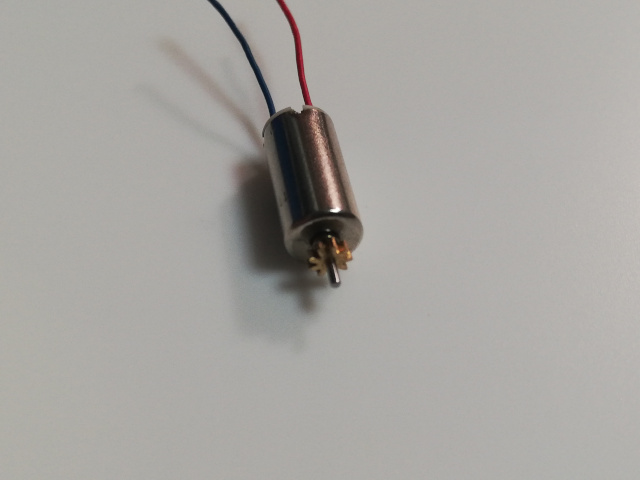
ハーフマウス用のモータ
重量の重いハーフマウスは、MK06-4.5モータの特性だと12m/ssの加速が厳しい。そのため、もう少し電流の流れる(端子間抵抗が3Ωくらいの)モータを探している。
試しにAmazonで購入したこのモータは端子間抵抗が6~7Ωだった。たぶんMK06-4.5(端子間抵抗:約4.5Ω)より回らないので不採用。
こつこつ
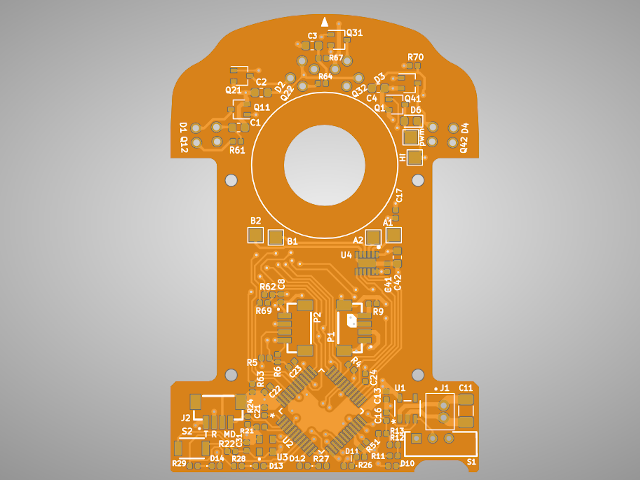
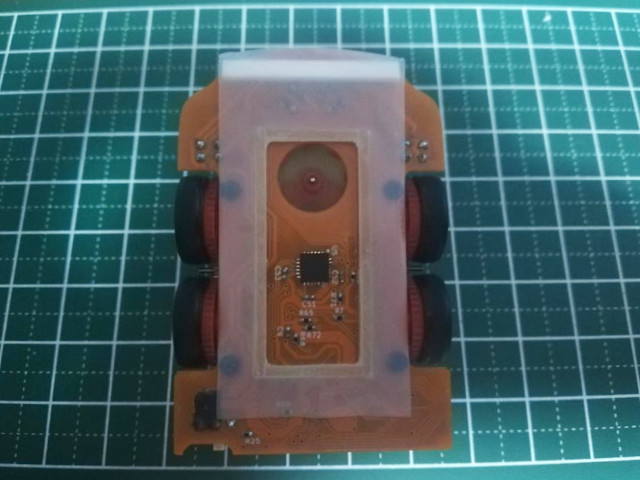
基板を発注する。今回の基板は0.6mm厚にしてみる。
こつこつ

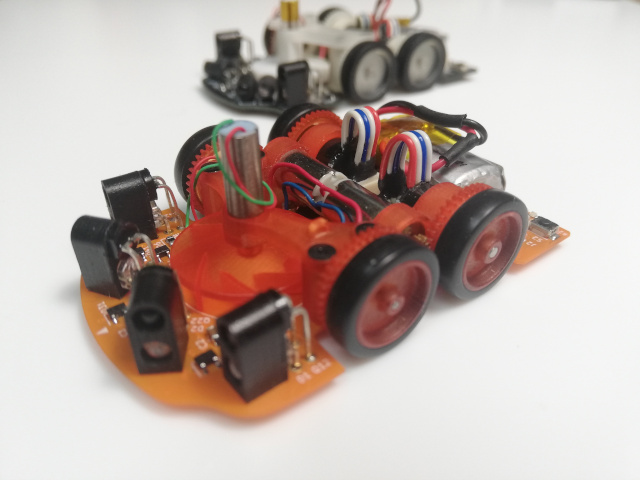
発注してたアクリル部品が届く、今回はオレンジ色で作ってみたが思っていた以上に派手。
なぜか白色で製造した物よりもエッジが立っていて精度が高そうな感じ。製造バラツキか、印刷向きか、色によって差があるのか?
こつこつ
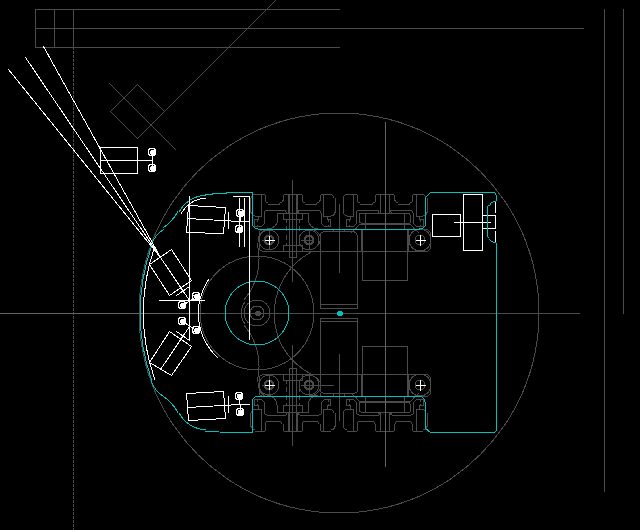
基板外形と壁センサの位置決め完了。次はパターン設計に移りたいけれどKiCADの操作の記憶があやしい
こつこつ
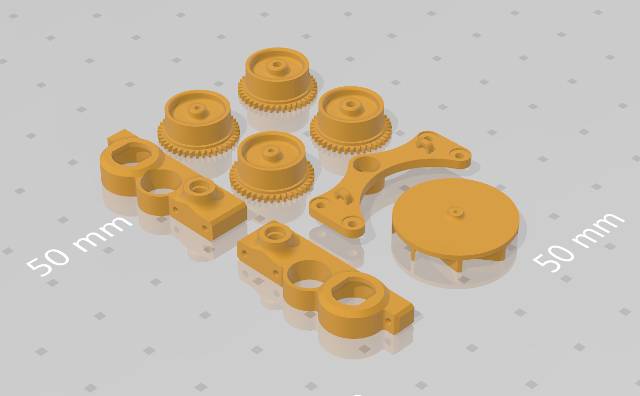
樹脂部品の発注を進める。
いつもならパターンレイアウトとメカとを何往復かして、全てが決まってから発注してたけど、見切りで注文するのは楽しい。
DMMへのデータのアップロードでSTLファイルだとファイルサイズ制限(100MB)を超えてしまったため、今回は3mfファイルで提出してみる。