やる事リストを潰していく
①探索走行でのターン前のオフセット距離を10mmから6mmに変更。探索速度は300mm/sなので壁検知からターン方向決定までの計算時間は20ms以内に完了する必要あり。
②電圧が3.7Vを下回ると走行を開始できないようにしていた処理を、電源投入後5秒間までしか行わないように変更
③走行終了後やアイドル時に壁センサの動作を500ms毎にしか行わないようにして省エネ化。壁センサ用のタイマーをCMT.CMSTR0.BIT.STR1ビットで動作・停止を切り替えてみる
マイクロマウス
真上から迷路を撮影しよう
この記事はマイクロマウス Advent Calendar 2021の6日目です。昨日の記事はtennisyiさんの紙式エンコーダの紹介という記事でした。重量やレイアウトの悩みが軽減される軽量小型なエンコーダは羨ましいです
それでは早速ですが↓の動画を見てください。真上から撮影された迷路は見やすいですよね。
この動画はブーム付きマイクスタンドに、マイクスタンド⇒カメラ&レコーダー 変換アダプターを使って、画角78度のWebカメラで撮影しました。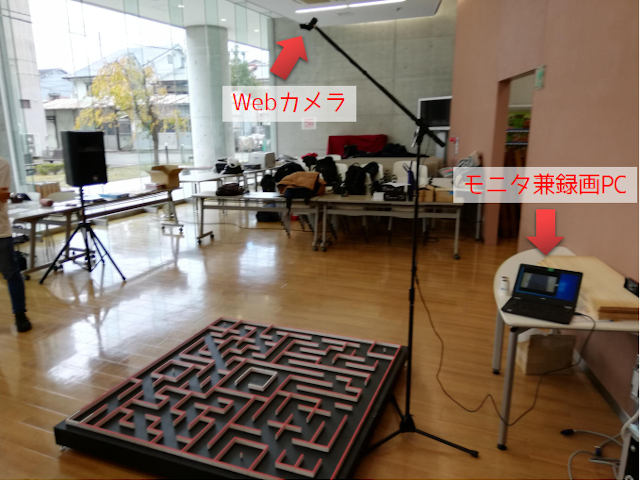
上記のブーム付きスタンドを利用することで人の2mを超える高さから撮影ができます。さらに、ブームアームによって迷路を上空から見下ろすアングルで撮ることができます。
この撮影方法によればマウスが壁に隠れることもないため、ターゲットの位置を正しく走っているかの確認が容易になります。さらに、競技者や審査員、観客の顔が映りこまないためWebにアップする際に(プライバシーに配慮して)ボカシ処理を入れる手間も無くなります。
ただ、今回の30fpsでの撮影では赤い彗星2.1 の第2走行以降は残像しか見えません。せめて60fpsで撮影するべきでした。
ということで、天井カメラや2階席といった設備が無い会場での記録用に各地区支部での導入いかかでしょうか?ちなみにクラシックマウス競技やマイクロマウス競技の32×32の迷路用に、さらに高い位置から撮影したい場合には一回り大きなブームアーム付きライトスタンドが選択肢なりそうです。
※今回のスタンドと画角の広いのカメラを組み合わせでも、画面の端が歪みを許容できるのであれば撮影はできます。
明日は InpさんのWebots×マイクロマウス(シミュレーション)についてです。お楽しみに!
ToDo
・省エネ化
関西地区大会で5走後にバッテリ電圧が3.7Vを切っていた。全日本だと持たなさそう。
・赤外線センサをOFFできるようにする
・ゴール後はOFFする
・180、90度の超信地旋回中はOFFしても問題なさそう
壁との距離が悪くない時は180度回転で回るはずが、90度づつの回転が多い。なんかおかしいので要確認
・探索時のゲインを下げる
・電圧低下しても操作できるようにする。
・探索の安定化
・探索時のゲインを下げる
タイヤに埃がつくと発振しだすことへの対処
・探索の90度旋回のRを大きくする
スリップ予防
・吸引ファン
なんでこんなに吸引しないのか?
・スカート変更
いままでの物は分厚て硬すぎることが判明
・ファンの電圧
ON固定が普通とは知らなかった
関西地区大会
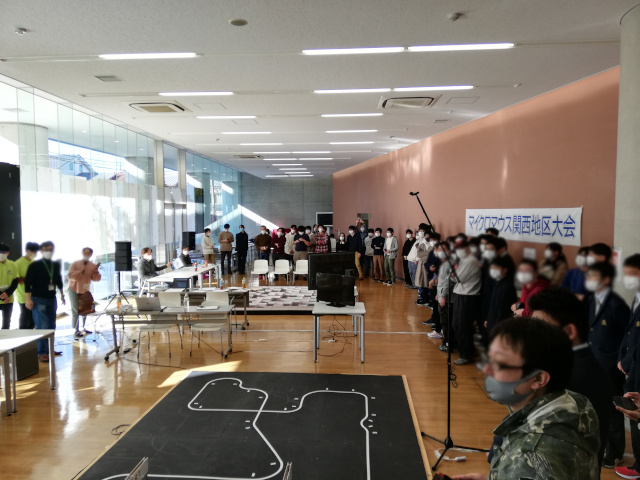
大阪電気通信大学で行われた2021年度マイクロマウス関西地区大会。2年ぶりの大会には約60人が参加し大賑わいで行われた。
快適な明るさの会場は、マウスには少し明るすぎたようで、前日の試走から大会を通して遮光に翻弄することに。そんな中、可視光センサのPicoがあまり影響を受けていないように見えた。なぜだろうか?
また、マイクロマウス競技の競技人口が増えていたのも印象的だった。HM-Starterが広げた裾野は大きい。
競技に参加したマイクロマウス部門の成績は2位。関西地区での入賞は初めてで嬉しい。景品のオシロスコープありがとうございます。

大会を開催してくださいました大阪電気通信大学自由工房の皆さん。参加者の皆さんおつかれさまでした。
パドックの様子

ロボトレースの設営の風景。
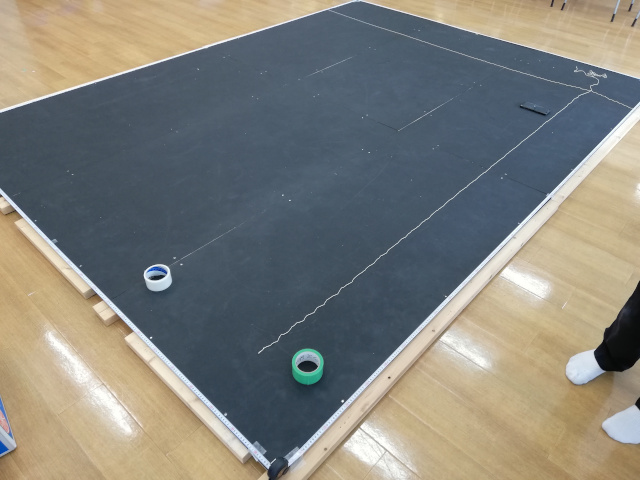
床材の4辺に設置したメジャーを読みながら、対辺のいる二人がタコ糸を引っ張ってX軸座標を位置決めし、さらにもう一組がY軸座標の位置決めすることで、コースの基準座標の印を付けていた。
こつこつ
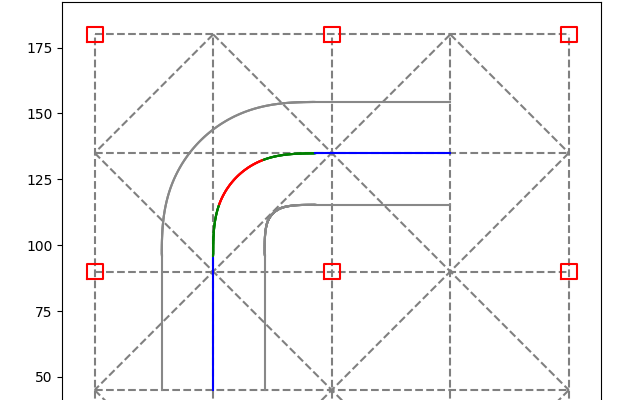
直進中に、車体の角度と目標角度の差異が90度を超えた場合には駆動を切る。これにより、クラッシュした時に暴走を続けることを抑えることができる。
斜め走行中に、壁に近づき過ぎた場合には、車体の目標角度を壁から遠く方向にする。具体的には前センサと横センサのどちらか一方の値が閾値を超えた場合に目標角度を5度ずらす。
九州地区大会
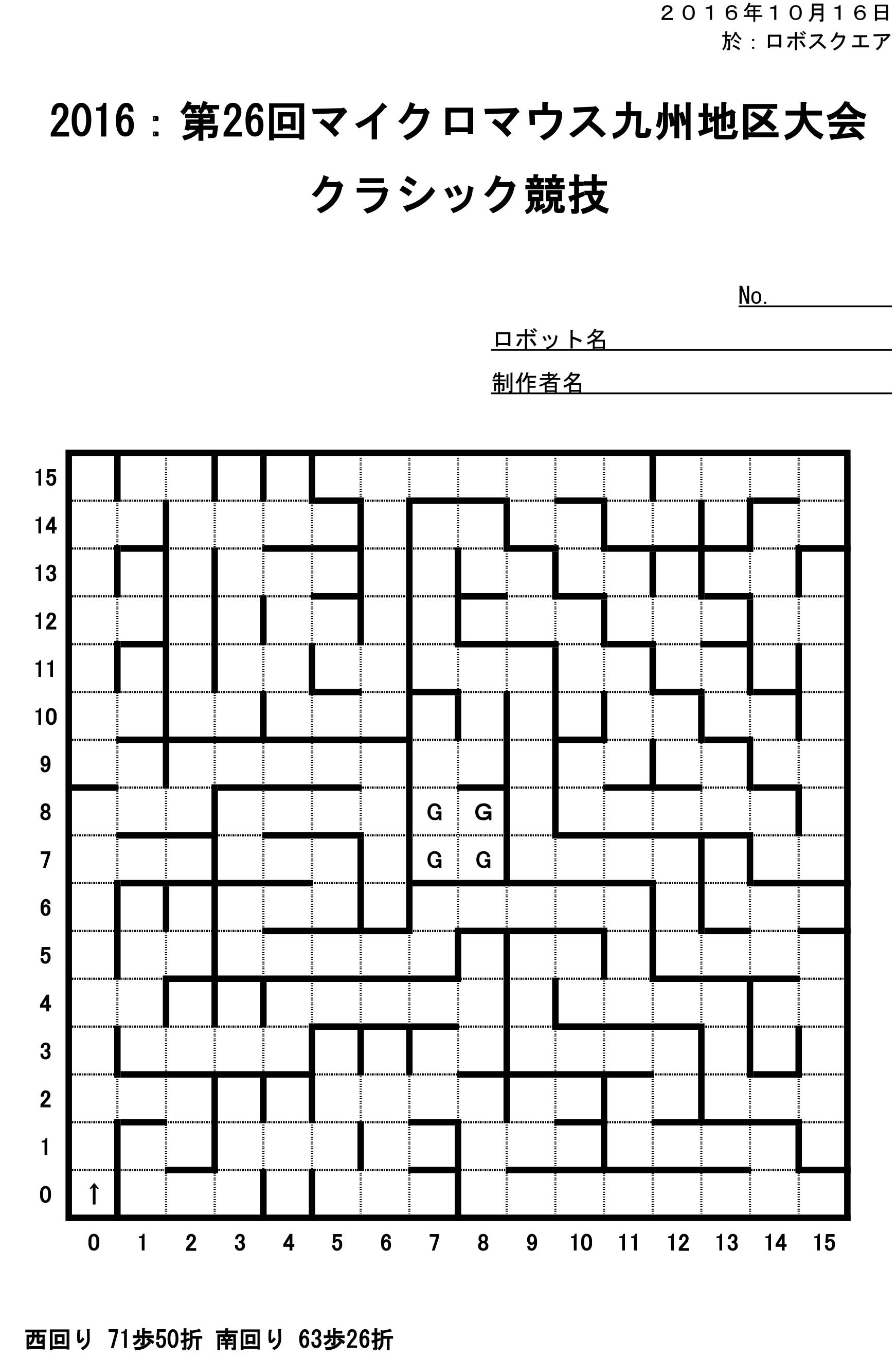
熊本高専で行われた第30回マイクロマウス九州地区大会。
迷路レイアウトは過去の九州地区のクラシック迷路から くじ引きで選択された。
選ばれた迷路は2016年のレイアウトで、3本のある斜め区間が特徴的である。
大会結果は2位。昨日組み込んだ処理である斜め走行から脱出時の壁切れ補正が功を奏したようだ
リアルでの大会は2年ぶりで本当にありがたい。
大会を運営してくださった熊本高専の皆様ありがとうございました。
{kind=link}
こつこつ
備忘録。明日は九州地区大会である。
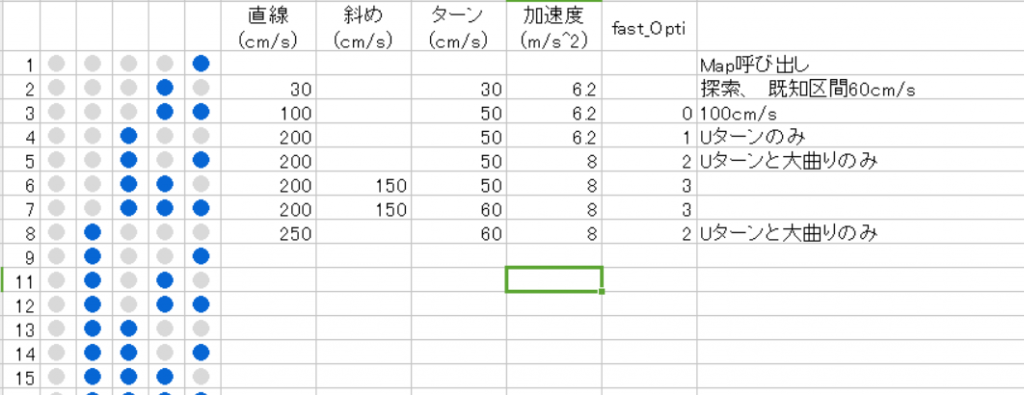
・パラメータのカンペを作成
・斜め走行からの出口での壁切れ検知を追加
今後の検討として、例えば直前がVターンの場合には、直前のターン中に壁切れが起きるため補正の距離がズレる。直前のターンの種類によって壁切れからの距離を切り替える処理があったほうが良さそう。
・メイン環境のデスクトップPCと遠征用のノートPCでシリアルポートのcom番号が異なるっていたのを修正(Renesas Flash Programmerの再設定の手間を減らす)
壁トレース制御のやり直し
どうやって真っ直ぐ走ればでやっていた方法だと速度を上げていくにつれて蛇行が酷くなってきたので変更する。
壁トレースができる場合は壁との変異をヨー速度の制御量に変換する。
壁トレースができない場合は角度0になるように制御する。
壁トレースの可否の判断は左右のどちらの壁も使えないと判断した場合
壁が使えなる判断は、横壁センサの値が閾値よりも大きい&横壁センサの値が8mm前よりも小さすぎない&過去8mmに置いて壁在りの判定となっている。ことを条件に判断する
todo
・串区間の制御
・斜め走行の壁トレース
・斜め走行の出口の壁切れ
こつこつ
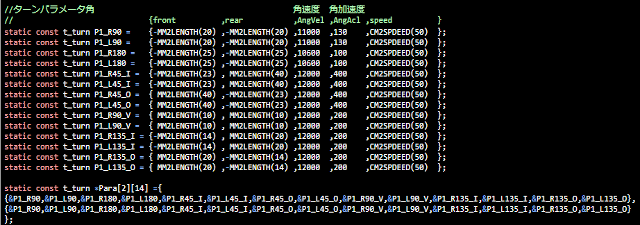 ターン毎のパラメータ格納を考える
ターン毎のパラメータ格納を考える
ターン前オフセットとターン後オフセットと最大角速度と角加速度と速度とを構造体で宣言して、それを配列まとめてみる。x = Para[0][5]->AngVel; で呼び出す感じ
直線走行時のヨーゲイン
タイヤに埃が着くと急に機体が振動的になる場合があったのでメモ
タイヤに埃がついたり、特に探索中の小さなRでは変則4輪の接地は不安定にった場合に、変則四輪のヨー減衰性?が下がることで完全な接地状態でのゲイン設定では走行中に機体が振動するようだ。
曲がりにくい変則4輪ということでハイゲインにしていたけれど、2輪状態で振動しない程度の値にすべきか?