
POMは専用の接着剤でもイマイチ付きが悪いが、はんだコテを融点少し上の200℃位にして、接合部を溶着すると硬めに固定することができる。そうすることで、破損したホイールとかも、応急処置をすることができる。
2018信州総文祭MCR
総文祭にお招き頂く、
多くの参加人数と広い会場で行われた大きな大会は、一日目に試走、2日目にフリー走行による予選。3日目に決勝が行われた。
決勝は2回走行の合計タイムによる順位づけで、1走目はビブスによりIN,OUTどちらかの走行になり、2走目がは1走行目の記録の上者のみがINコースで単独走行を行い、2回走行の合計タイムを競うルールである。
決勝1走目は、完走率も高いが、それ以上に、最初から可也の速度で走る車が多く大会のレベルの高さを感じられた、
決勝2走目は、何秒で走れば1位になるかの表示や、おそらく初の試みとしてコースの区間タイムを測定により、その時点の、区間ベストタイムとのタイム差が表示され、どこで差がつくのかも見れる。
区間タイムを見ていると第1から第3区間まではベストタイムにも関わらず、ゴールでのタイムが伸びない車や、その逆もあり、最後の区間の差が勝敗を分ける部分があったようだ。
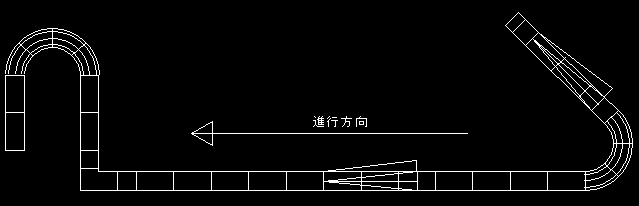
上図が最後の区間。上り坂、135°カーブ、坂上の長い直線、下り坂、直線、クランク、180°カーブで構成される
決め手は恐らく、下り坂を含む直線でどれだけ踏めたかだろうと思う。
通常、坂上の区間は短くタイムへの影響が小さいので、下り始めのトレースの安定性確保のために速度を落して走るのが定石だが、今回のコース(下り坂前後が直線)に限っては、結果論だけど、坂上の最初のカーブ後には速度を出して行ったほうが、多少ライントレースや車体が暴れようとも良い結果につながる。
普段見かけないレイアウトなので想定調整はしていないだろうから、本番一発で飛ばしていった覚悟は見事である。
参加者や引率の皆様、大会を運営いただいたボランティアを含めたスタッフの皆様、おつかれさまでした
たまには
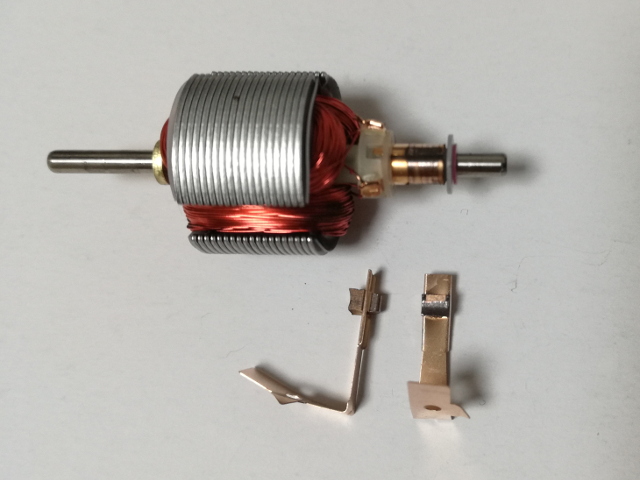
1年位ぶりにモータを交換、オーバーレブは控えめにしてるのでコミュはそれ程痛んでないが、ブラシはかなり消耗。
マイナーチェンジ
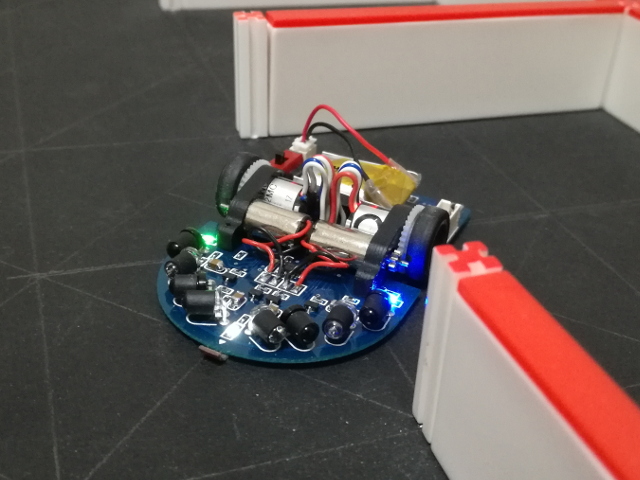
回路と基板を少し変更する。
赤外線センサの発光回路と、角度を変更と、前後重心位置を変更
発光回路は、コンデンサからの放電で最初の電流を初期の電流を増やす形に、応答波形はサージパルスのようなインパルス波形になるので、そのピーク後の、緩やかに下がる期間にAD変換で取り込む。AD変換開始までの待ち時間を変更することで回路部品のばらつきを調整できた。
光軸と、感度を別々に調整できるのは、ありがたい。
(環境光ではなく、環境温度で特性が変わるような?だめかも)
センサの角度
前壁センサは壁に対して10度から5度に、横壁センサは壁に対して45度から30度に変更。
ついに、安定して前壁が見れるようになった
次に、重心位置
余りにセンター過ぎたので、今回は車軸を約1mm後退させて重心を前にずらす。
加減速時のピッチは、少しは良くなったっぽい。
マウスで試行錯誤して思うに、ノウハウというか、勘所というか、最初に抑えているのだろう箇所で躓いている。
恐らく、MCRにも、速く走るロボットには無意識に当たりまえだけど、わざわざ一般化されてない事があるのだろうな
売ってるところには

最近どこも売り切れで、たまにオークションで出品されると、なかなかの価格になるES539サーボ
しかし、海外まで探すと売っているものである。

買い増し
マイコンカーラリー技交流会

神戸科技高で行われた技術交流会に参加する
関西地区以外にも、広島、福岡、宮崎からの参加者があり30人ほどでの走行会となった。
ちなみにコースレイアウトは先の福岡県技術交流会の長さ違い。
競技は学生A,B,一般A,B,画像処理の5部門で行われ、全国大会でも活躍したロボットの速さを、近くで見ることができた。
イベントを開催してくださった近畿MCR事務局の皆様、ありがうございました
舵角も小さく、滑っていない箇所での速度が上がらない。単純にPWM設定出力が低いいこと原因だが、なぜに、こんなに下げているのか?
JMCR札幌モーターショー2018

札幌ドームで行われたJMCR札幌モーターショー大会2018に参加した
JMCRの名の大会は、何年ぶりだろうか
MCRの聖地の札幌に全国から50台程度が集まった大会となった
大会は一日目に試走、2日目に大会というスケジュールで、
始終モーターショーからの多くの観客の流れがあり賑わっていた。
競技は、室温も高く状態の良いコースなので、全開走行が可能だったが
なーんか加速が鈍く、夏のRMCR大会から使っているモータが傷んでいるかと考えふけていたら、実はバッテリが故障していたり。
予選の終盤にバッテリを交換し満足な記録は出たものの、CMA-さんの異次元の走りには、まったくついていけず。
それでも、運よく準優勝でき、JMCRの賞状を貰うことができた。
素晴らしい大会を運営して下さった、北海道地区の皆様、ありうございました
また、札幌行きたいなー
九州地区大会
台風の最中、熊本高専で行われた九州地区大会に参加する。
結果は運よく3位。
楽しい大会ありがうございました
0.5mmも無い段差でジャンプしているように見える。
ここで、姿勢と距離がずれる
3回のリタイアは全てココに引っかかってしまった