
北陸信越大会に初参加。会場は新潟駅に近い繁華街にある新潟コンピュータ専門学校で、毎食ともに地元の美味しいグルメを満喫できた。

魚が美味しい

団子も美味しい

カレーも美味しい
食べ物の美味しい地区の大会は素晴らしい
そて、競技は運よく優勝。直進優先の経路が功を奏して不安定なターンでも完走することができた

大会を運営頂いた北陸信越地区の皆さま、新潟コンピュータ専門学校のみなさまありがとうございました
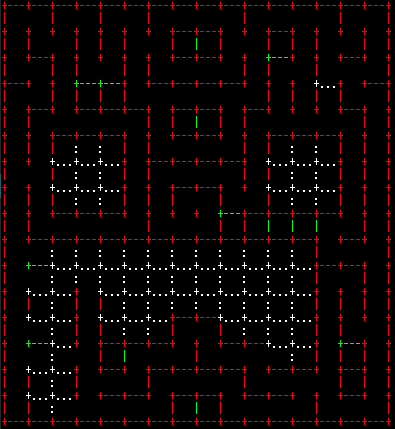
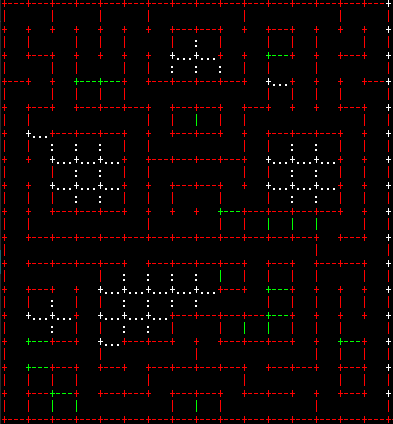
V4とV5で探索結果が違うのなぜだろうか?
北陸信越大会に初参加。会場は新潟駅に近い繁華街にある新潟コンピュータ専門学校で、毎食ともに地元の美味しいグルメを満喫できた。
魚が美味しい
団子も美味しい
カレーも美味しい
食べ物の美味しい地区の大会は素晴らしい
そて、競技は運よく優勝。直進優先の経路が功を奏して不安定なターンでも完走することができた
大会を運営頂いた北陸信越地区の皆さま、新潟コンピュータ専門学校のみなさまありがとうございました
V4とV5で探索結果が違うのなぜだろうか?
今まではゴール区間に入ると1区間と半分だけ(東西南北方向に)直進する処理をしていた。しかしながら、この処理だとゴール区間に斜めに侵入したときに1ターン増えてしまうため、ターン前の減速によるタイムロスと、ターンの失敗の可能性を含んでいた
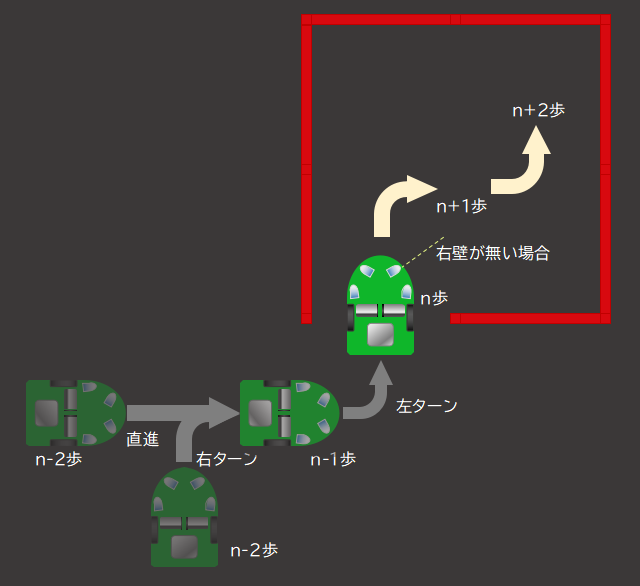
というわけで、処理を変更して斜めのままゴールできるようにする
例えば、ゴール区間に到達するn歩目とn-1歩目との間が左ターンで、n-1歩目とn-2歩目の間が直線または右ターンの場合(つまり左ターンではない場合)、ゴール区間の右側の壁が無ければ、n歩とn+1歩の間に右ターンをn+1歩とn+2歩の間に左ターンを追加することで、n-1からn+2までを斜めの直進に置き換えられるようにする

1つ前の機体の作製時から気になっていたのだけれど、内径1mmのベアリングにはマイナス公差のシャフトが入らないことが多々ある。ベアリングは有名メーカの物なので、試しにシャフトのメーカを変えてみても変わらない。
しかたないので、ベアリングとシャフトを沢山買って、上手くはまる組み合わせを選別して使っているが、釈然としない
1.5mmのシャフトの時は起きなかった気がするので、設計が上手くいくなら1.5mmに戻したいところ
大阪電気通信大学で行われた2023年度マイクロマウス関西地区大会、延べエントリ111台の大きな大会となりました。皆様お疲れ様でした。
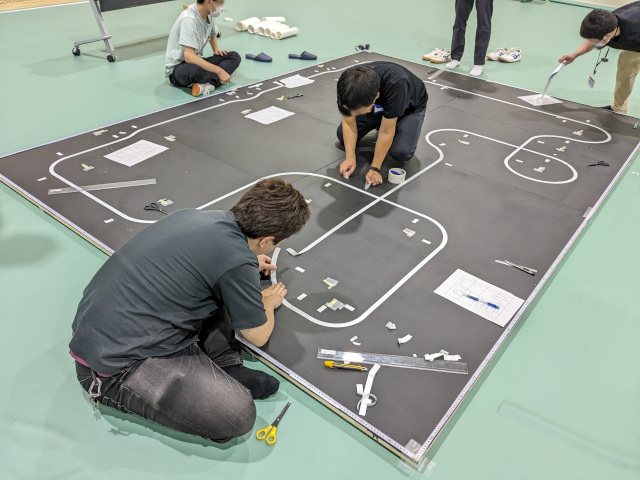
金曜日から行われていた会場設営は、翌日の土曜日も自由工房のメンバーたちによるクラシック迷路の設営や、早めに到着した競技者たちの手伝いもあってスムーズに進んで、午後1時からは試走会が開始できました。

日曜はパドックも大賑わい、机は丁度で足りた様子

競技の観戦も賑わい、それでも会場が広いおかげで渋滞はしない
今回の大会は、クラシック競技とハーフ競技は競技時間を5分設定ではあったが、未出走の機体があっても、ちょうど時間内に終われた様子だった。2面での大会運営だと今回の参加台数がギリギリのように思う
個人の競技成績は狙った当たりのタイムで6位になりました。

 M5stackで動かすマウスと考えながら……
M5stackで動かすマウスと考えながら……
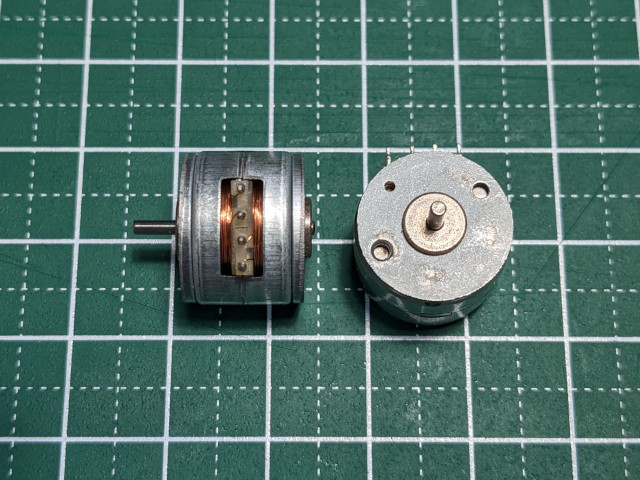
https://www.amazon.co.jp/gp/product/B00PZYKNLC/
巻線抵抗は10Ω
本体の直径は15mm
出力軸は太さ1.5mm,長さ4mm
1回転のステップ数は20パルス
もう少し直径が大きくてよいので、巻線抵抗が大きくて、ステップ分解能が高い物が欲しいかも
https://www.digikey.jp/ja/products/detail/portescap/26M048B1B/417812
直径26mm、巻線抵抗20Ω、1回転のステップ数48(Portescapだけあって高価)
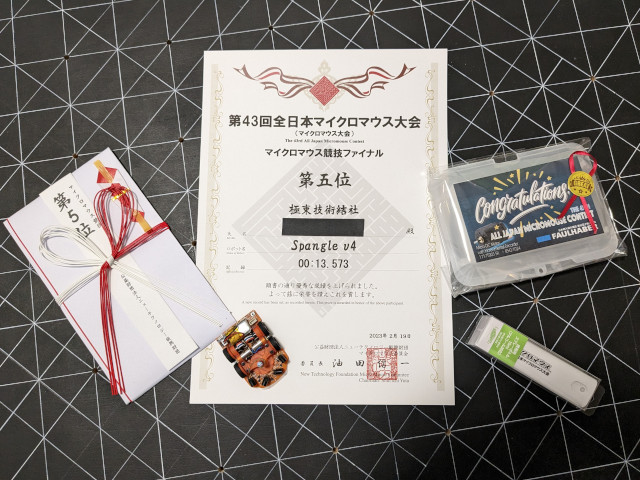
大会を運営してくださった皆様ありがとうございました
久々に追い込まれた大会だった。地方大会以降に発生していた問題は影を潜めたものの、進行停止時に止まれずに動いてしまう不具合と、壁の読み間違いとに睡眠時間を削って対応し続けることになった。
進行停止時の不具合は”停止コマンド”の中身の処理間違いで、競技ギリギリまでデバグしていて、ぶっつけ本番の競技での探索では車体が止まるたびに肝が冷えて、こちらの気力がもたないことに。
また、壁の読み間違いは怪しい場合に前壁センサで読み直すことにしたのはいいが”怪しい”を上手く設定できずに、いたるところで壁を再確認してしまいFinalの迷路でも見直しに時間を取られて全ての区間を探索しきれなかった
それでも、競技結果は個人最高順位の5位。探索の成功と、予定していたパラメータ以上での走行に成功できたのは運が良かった
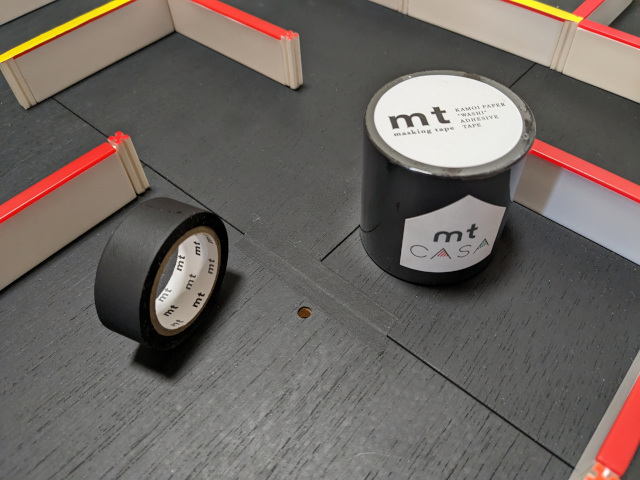
継ぎ目の隙間とか、段差とか、迷路ベースのズレとかの改修にマスキングテープが良さそう。
写真の艶なし黒色のマスキングテープは、表面のザラツキ加減がカッティングシートとかビニルテープとかに比べてマウスの迷路版に近い。また、テープの厚み薄くて走行の邪魔にならいし、粘着力が弱いのでコースも痛めにくい。
ダイクストラ法を使った最短経路導出を入れてから発生していたメモリ破壊
原因は分からないものの、最終的には迷路の壁情報、コストといった配列のサイズを33×33、つまり23×32より1列増やすと意図通りに動くようになった。
しかし、何故かダイクストラ法に関する配列のサイズは32×32にしていても問題なさそうで本当に分からない
また、不具合解析の途中で見つけて対処した他の内容、たとえば、メモリ変数領域を逸脱しそうな処理とか、関数内に大きなメモリを確保したことによるスタックサイズの溢れとかは影響していたのかどうかも分からない
この記事はMicro Mouse Advent Calendar 2022の14日目の記事で、昨日の記事はNoriさんの「STM32CubeMonitorの紹介」でした。マイコンの変数をリアルタイムに可視化、とても便利そうな機能で使ってみたいし、ルネサスにも欲しい。
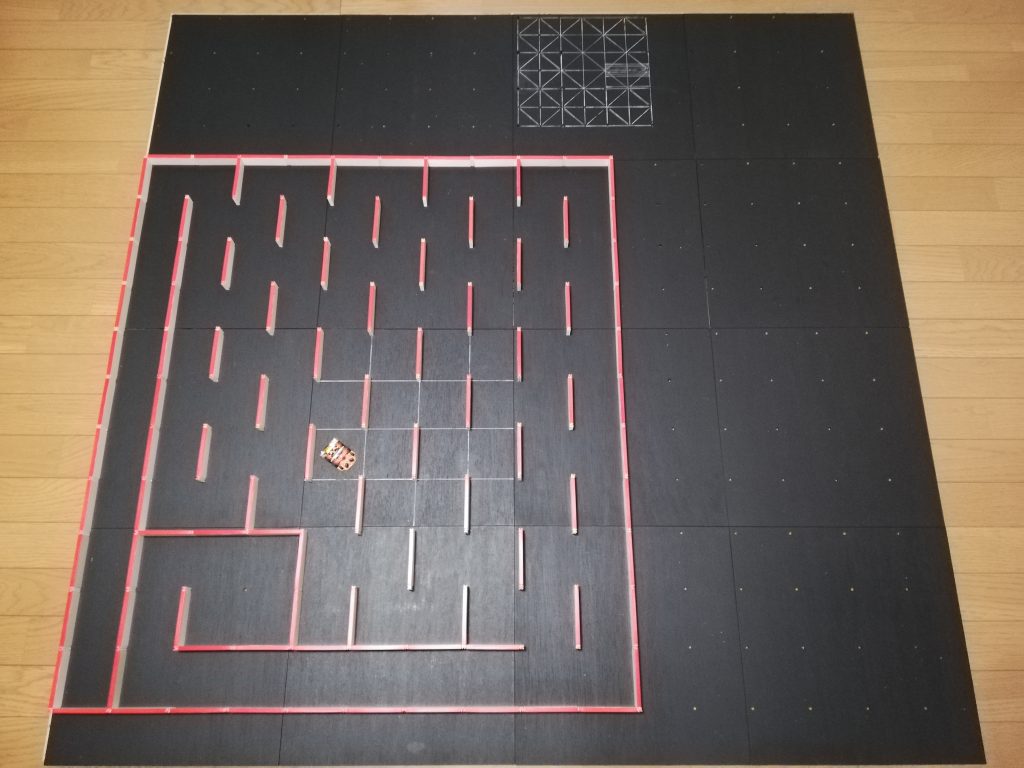
部屋に15×15サイズの迷路が準備できつつある。この迷路はハーフマウスのタイル式マイクロマウス迷路用ベースを16個組み合わせたもので、移動制限の厳しい去年、どうしても大きな迷路を走らせたいと願っていたらいつの間にか手元にあった。たぶんアールティ社の次に沢山持っていると思う。
複数個の迷路ベースを組わせて作る迷路は、個々の迷路ベースどうしが固定されないために組付け時にズレて並べてしまったり、迷路ベースの並びを変える時にもズレてしまうことがある。もちろん組み立てた後にもズレやすくて、例えば住環境で広い迷路を広げようとすると床に迷路を敷くのが楽だけど、その迷路の上を歩くとズレる。
そこで今回は、迷路ベースのズレを抑える小ネタを紹介
①シフトして並べる
 上の写真のように上下に並列する迷路ベースどうしを左右方向に1区間分ずらして並べる。こうすることで写真の上下方向への迷路ベースの位置がずれにくくなる。
上の写真のように上下に並列する迷路ベースどうしを左右方向に1区間分ずらして並べる。こうすることで写真の上下方向への迷路ベースの位置がずれにくくなる。
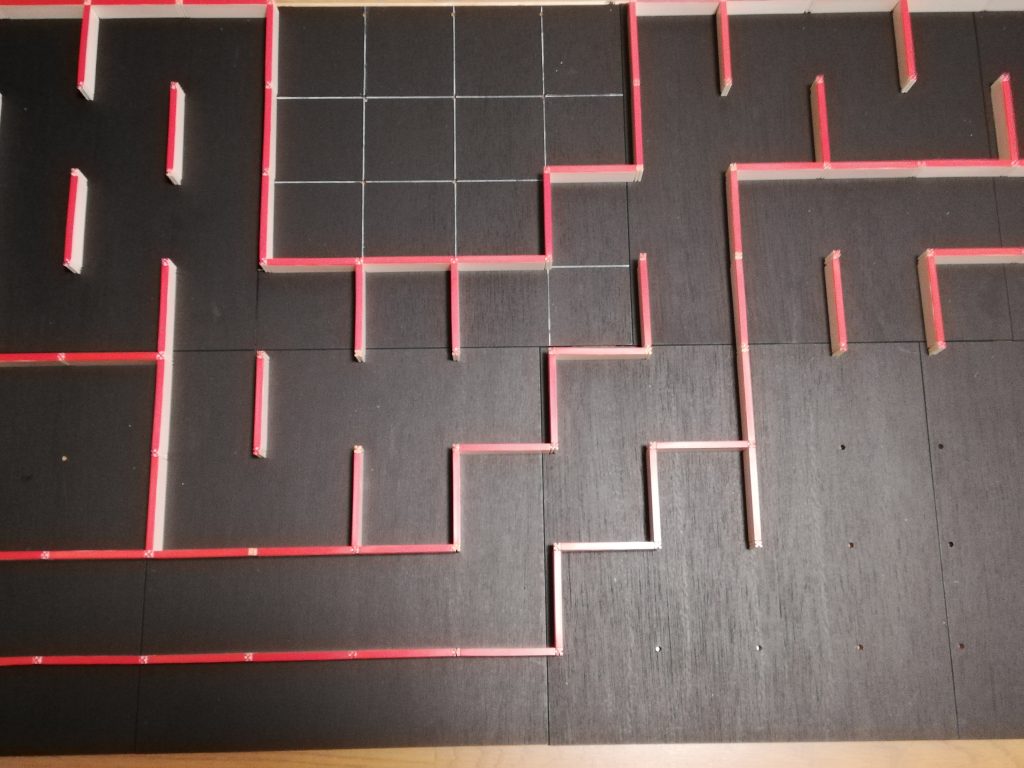
②迷路の外形の柱と壁をテープで固定する

迷路ベースの連結部分に架かる壁と、その左右の柱と壁とを養生テープで固定する。こうすることで迷路ベースどうしが離れることによるズレを止めることができる。養生テープの幅は25mmが使いやすい。
③壁と柱を接着
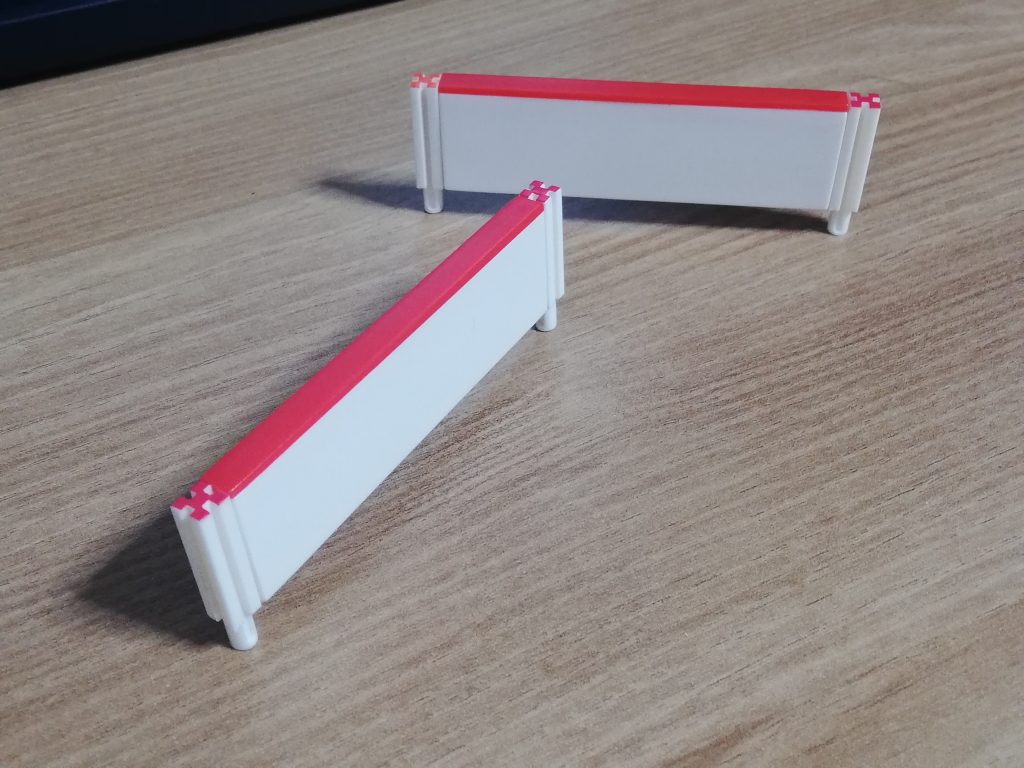
迷路の外周だけでは固定が不安な場合に迷路の内側に使うのがコレ。1枚の壁とその両端にはまる柱を接着材で固定して1つのユニットにしたもの。コレを迷路ベースの連結部分に架かる部分の壁&柱として使用する。
迷路ベースの柱用の孔の間隔の公差、迷路ベースどうしを組わせた時の公差を吸収するために、壁と柱との接着には弾性のあるゴム系接着剤(ex.スーパーXの透明)を使用する。
また、壁と柱を0距離で固定してしまうと迷路ベースの孔の間隔よりも短くなりすぎるので、実際の迷路ベース上に柱を刺した状態で柱と壁とを接着する。
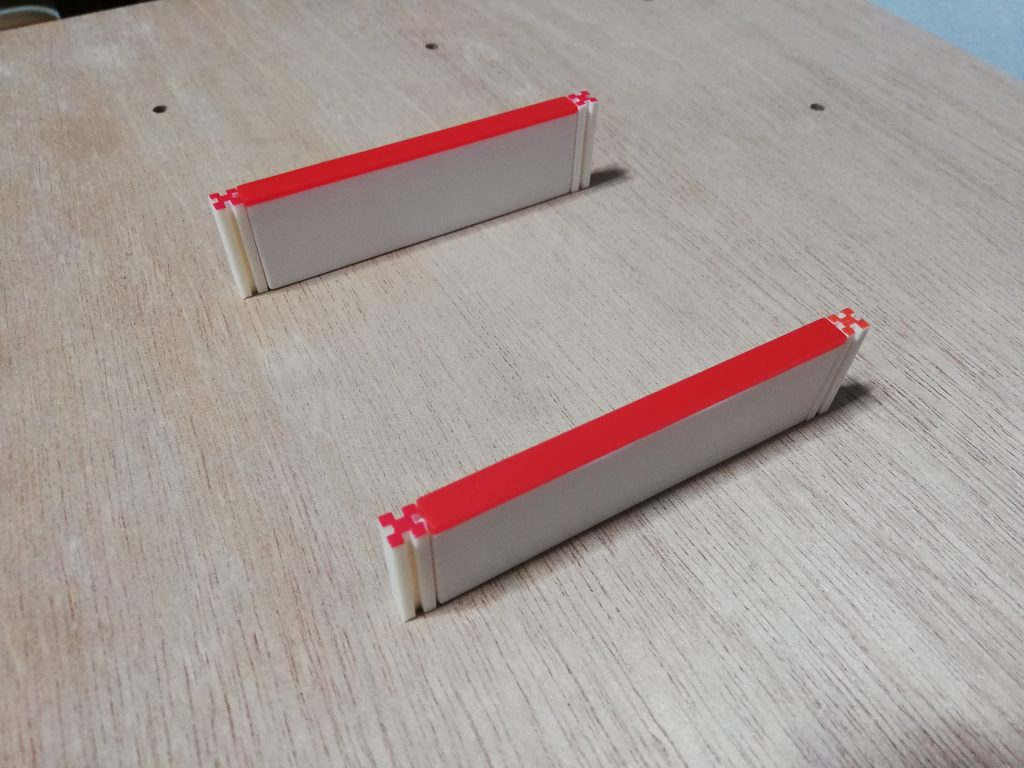
この時、迷路の塗装面に接着剤がつかないとうに迷路ベースの裏面を使うと安心できる。

ついでに、迷路ベースの厚さと柱の差し込み部分の長さからくる柱の浮きが気になる場合には、あらかじめ柱の差し込み部を1.5mmほど削っておく
というわけで、タイル式マイクロマウス迷路用ベースはいいぞ。
明日はNakashimaさんによる「最近買った充電器のはなし」です。ガジェットはいくつあっても良い。民望書房にもそう書かれている
