〇久々に串区間の制御を入れる
左右の壁切れ位置の差を測って、差が5mm以上差があるようなら、進行方向を3度ずらして30mm進む。
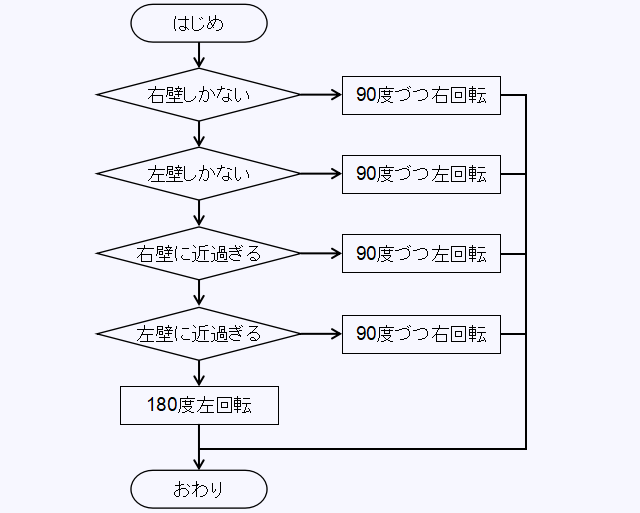
〇変則四輪では90度づつの超信地旋回はあまり適切ではないのでないか?タイヤの汚れ具合にによっては90度回転したときに車体の位置が前後左右に大きくズレることがある。
だとすれば、素直に1回で180度回転をして、その後に、左右センサで左右のずれを測定して、壁切れで前後位置のズレを測定して、次のターンのオフセット距離で補正したほうが良いように思う
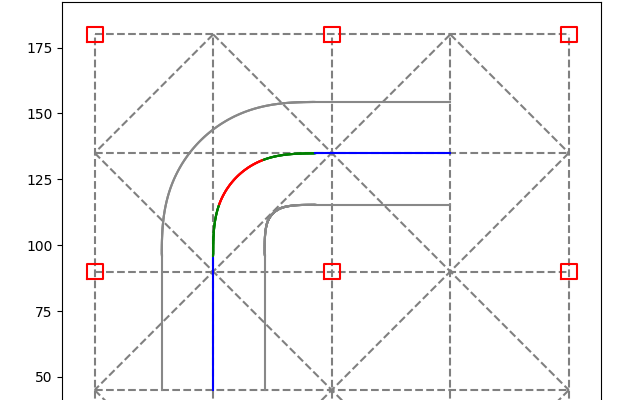
〇直線の終わりの定速度走行区間
ターン前には一定速度で走る区間はどのくらいにすべきか?というか揺らぎはどの程度が?
最高速度から定加速度で減速していく作りなので、最高速度が速いほどに減速中の誤差の蓄積が厳しくなってしまう。
とりあえず2cm、または、最高速度で10ms進む距離(4m/sなら4cm)の長いほうに設定するが、
リアルタイムに位置と速度から加速度を更新したほうがよいのだろうか?