直進中に、車体の角度と目標角度の差異が90度を超えた場合には駆動を切る。これにより、クラッシュした時に暴走を続けることを抑えることができる。
斜め走行中に、壁に近づき過ぎた場合には、車体の目標角度を壁から遠く方向にする。具体的には前センサと横センサのどちらか一方の値が閾値を超えた場合に目標角度を5度ずらす。
直進中に、車体の角度と目標角度の差異が90度を超えた場合には駆動を切る。これにより、クラッシュした時に暴走を続けることを抑えることができる。
斜め走行中に、壁に近づき過ぎた場合には、車体の目標角度を壁から遠く方向にする。具体的には前センサと横センサのどちらか一方の値が閾値を超えた場合に目標角度を5度ずらす。
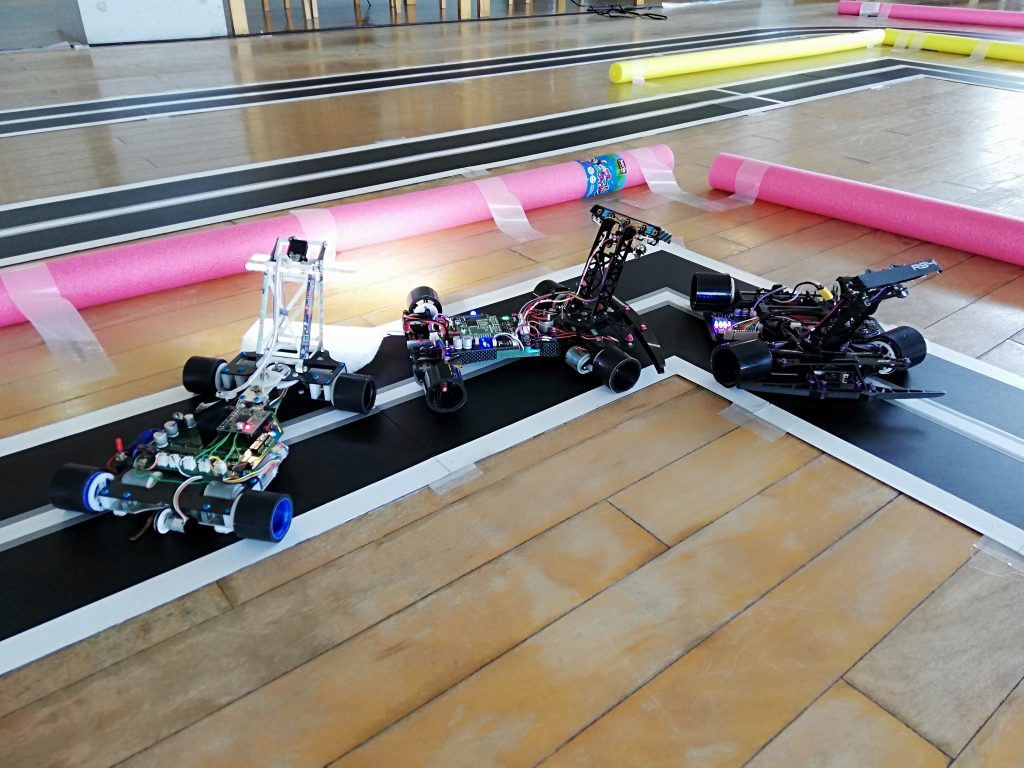
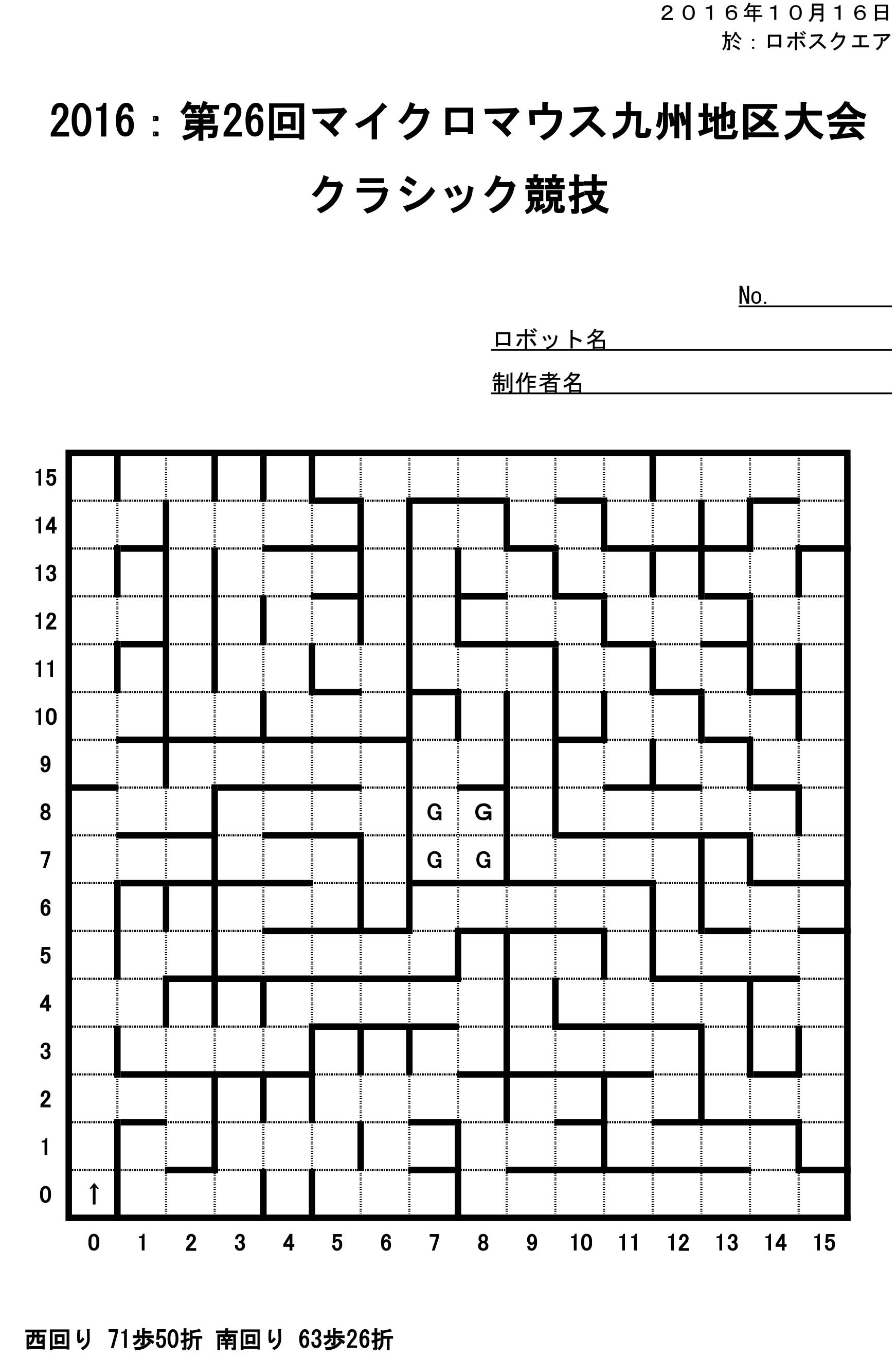
熊本高専で行われた第30回マイクロマウス九州地区大会。
迷路レイアウトは過去の九州地区のクラシック迷路から くじ引きで選択された。
選ばれた迷路は2016年のレイアウトで、3本のある斜め区間が特徴的である。
大会結果は2位。昨日組み込んだ処理である斜め走行から脱出時の壁切れ補正が功を奏したようだ
リアルでの大会は2年ぶりで本当にありがたい。
大会を運営してくださった熊本高専の皆様ありがとうございました。
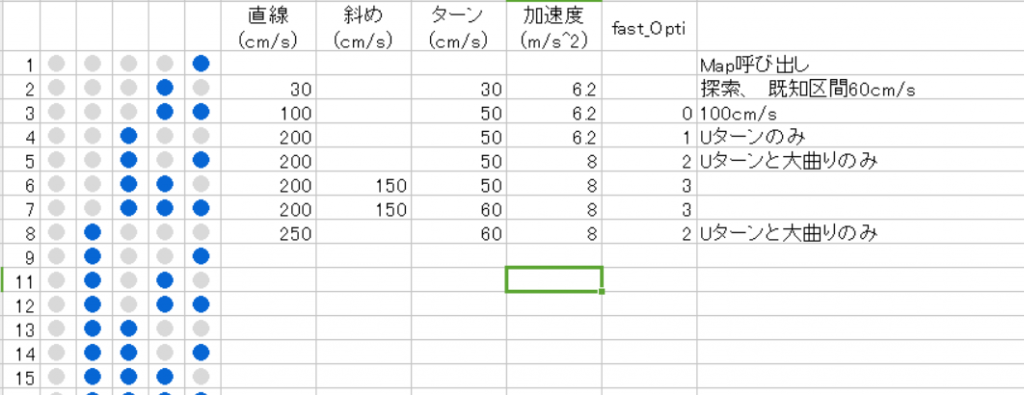
備忘録。明日は九州地区大会である。
・パラメータのカンペを作成
・斜め走行からの出口での壁切れ検知を追加
今後の検討として、例えば直前がVターンの場合には、直前のターン中に壁切れが起きるため補正の距離がズレる。直前のターンの種類によって壁切れからの距離を切り替える処理があったほうが良さそう。
・メイン環境のデスクトップPCと遠征用のノートPCでシリアルポートのcom番号が異なるっていたのを修正(Renesas Flash Programmerの再設定の手間を減らす)
長崎総合科学大学で行われた走行会に参加する。関東からの参加者もあり始終楽しい雰囲気のイベントとなった。
眺めの良い部屋にレイアウトされたコースはイベントに向けて新たに作ったとのことで、グリップも良くほぼ全開で走らせることもできた。
イベントを開催してくださったNiASのスタッフの皆さまに感謝いたします。

どうやって真っ直ぐ走ればでやっていた方法だと速度を上げていくにつれて蛇行が酷くなってきたので変更する。
壁トレースができる場合は壁との変異をヨー速度の制御量に変換する。
壁トレースができない場合は角度0になるように制御する。
壁トレースの可否の判断は左右のどちらの壁も使えないと判断した場合
壁が使えなる判断は、横壁センサの値が閾値よりも大きい&横壁センサの値が8mm前よりも小さすぎない&過去8mmに置いて壁在りの判定となっている。ことを条件に判断する
todo
・串区間の制御
・斜め走行の壁トレース
・斜め走行の出口の壁切れ
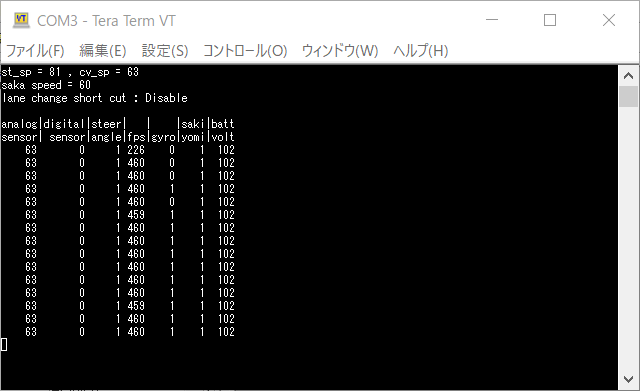
半年ぶりに機体に電源を入れても、どのような設定になっているかは覚えていないし、プログラムもどうなっているか覚えてない。当然、起動時のシリアルログが何を意味しているかも分からない。なので少し情報を書き足して分かるようにする。
物理インターフェースも毎回ソフトを確認して操作を思い出しているのでマニュアルが欲しいところ

↑代表的なニッケル水素電池の放電特性の実測値の記事があるトラ技
ところで、元々バッテリの管理はしていかったのだけど、最近では充電の間隔が半年とかになっているので記憶のためにメモを残すことにする
エネループプロ
2021/7/21 室温26.5℃ 放電1.1A/8.8Vカット 充電1.6A,12.58V,2221mAh
天豪①
2021/7/22 室温26.5℃ 完全放電から 充電1.6A,11.6?V,1746mAhで手動停止
天豪①
2021/10/29 室温26.0℃ 完全放電(7.2V位)から 充電1.6A,11.76V,1708mAhで手動停止
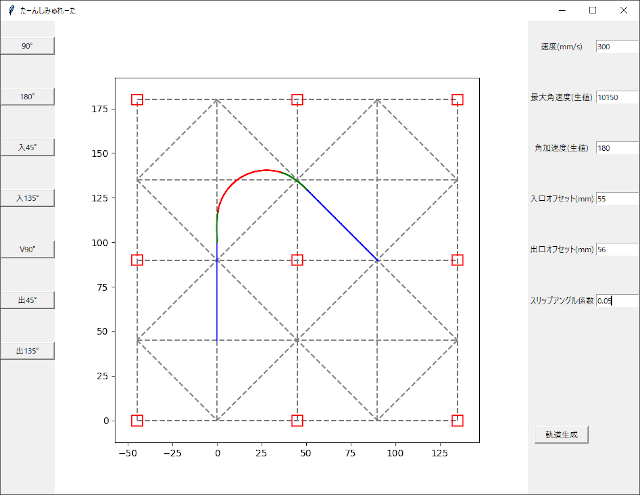
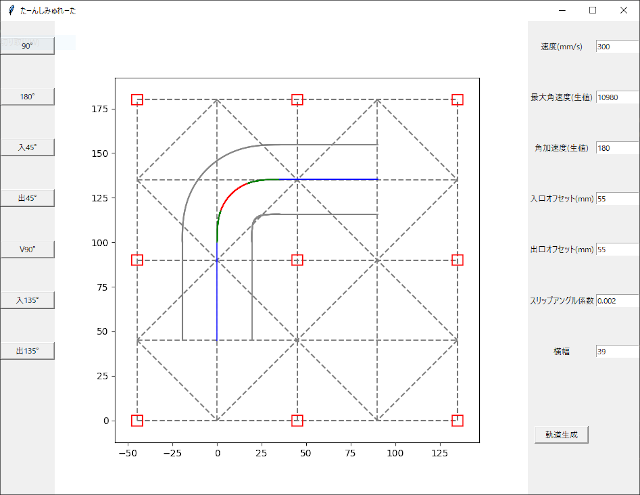
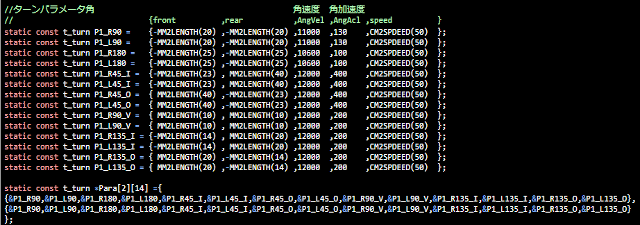 ターン毎のパラメータ格納を考える
ターン毎のパラメータ格納を考える
ターン前オフセットとターン後オフセットと最大角速度と角加速度と速度とを構造体で宣言して、それを配列まとめてみる。x = Para[0][5]->AngVel; で呼び出す感じ
タイヤに埃が着くと急に機体が振動的になる場合があったのでメモ
タイヤに埃がついたり、特に探索中の小さなRでは変則4輪の接地は不安定にった場合に、変則四輪のヨー減衰性?が下がることで完全な接地状態でのゲイン設定では走行中に機体が振動するようだ。
曲がりにくい変則4輪ということでハイゲインにしていたけれど、2輪状態で振動しない程度の値にすべきか?
調整の効率化のため、こつこつと
//スリップアングルというか回転半径を機体の角速度で代替してるのよくないかも
21/8/14追記:タイヤ(≒車幅)の通過ラインはあったほうが良い
{kind=link}